- 飛行間の高度差は最大でも 2 倍に留めることを推奨します。これは、高度が異なると空間分解能も変わるためです。
- PIX4Dcloud は、建物の斜め画像から高品質の点群を生成します。
プロジェクトを開始する前に、PIX4Dcloud のベスト プラクティスと性能に関するガイドをよくご確認ください。
このページでは、最適な結果を得るために必須の前提条件の概要と、ソフトウェアの処理能力および特定の機能の有効性について詳しく説明します。また、クレジットの払い戻しや画像/プロジェクトの処理許容量に関する規定についても確認し、適用基準を理解しておくことも重要です。これらのガイドラインを十分に理解することで、プロジェクトで PIX4Dcloud をスムーズかつ正しく活用できます。
情報: データセットがベスト プラクティスの基準に満たないか、ページ内で説明される性能を超える要件が必要となる場合は、処理許容量またはクレジットは消費され、払い戻しはされません。
目次
ベスト プラクティス
- ミッションを計画しプロジェクト エリアや再構築対象のオブジェクトに合わせて画像を撮影します。
- 適切な地上解像度 (GSD) で画像を撮影します。
- 詳細で鮮明かつ十分なコントラストのある画像を撮影します。
- データセットに適した処理オプションを選択します。
- (任意) GCP を使用することまたは RTK ドローンで画像を撮影することで絶対精度を向上させます。
性能
PIX4Dcloud のベスト プラクティス
ミッションを計画しプロジェクト エリアや再構築対象のオブジェクトに合わせて画像を撮影します。
一般的なケース
ほとんどの場合、推奨される重複率は、飛行方向に対して 75 % 以上のオーバーラップと、飛行経路間で 60 % のサイドラップです。画像は、正方格子グリッド パターンで撮影すること (図 1) を推奨します。希望する地上解像度を得るには、カメラの高さは、地形/オブジェクト上で可能な限り一定の高さを維持する必要があります。
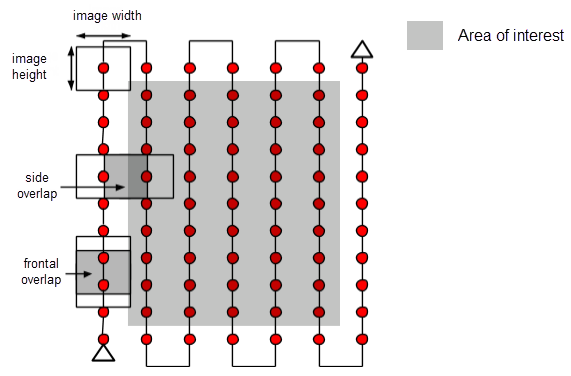
図 1 一般的に理想とされる画像撮影計画 - 一般的なケース
森林や密生した植生
樹木や密生した植生は、その複雑な形状 (無数の枝や葉) のため、重なり合う画像間であっても見え方がかなり変わることがあります。そのため、画像間の共通の特徴点 (キーポイント) の抽出が困難です。良好な結果を得るには、「一般的なケース」セクションで説明されているようなグリッド飛行による画像取得計画に以下の変更を適用して活用することを推奨します。
- 画像間の重複率を増やす: オーバーラップとサイドラップともに最低でも 85% に増やします。
- 飛行高度を上げる: 高い高度では、パースペクティブの歪みが少なく (そのため、見た目上の問題が少なくなる) 、密生した植生の視覚的特性が向上します。つまり、これらのエリアにおいて重なり合う画像間の視覚的類似性を検出しやすくなります。飛行高度、画像ピクセルの解像度と焦点距離により、画像の地上解像度 (空間分解能) が決定されます。地上解像度 (GSD) が 10 cm/ピクセルよりも大きい場合に、最適な結果が得られます。
平坦な農業用地
農業用地など、視覚的に均一で平坦な地形では、画像間で共通の特徴点 (キーポイント) を抽出することは容易ではありません。良好な結果を得るには、上記「一般的なケース」セクションで説明されているような、グリッド飛行による画像取得計画に以下の変更を適用して活用することが推奨されます。
- 画像間の重複率を増やす: オーバーラップとサイドラップともに最低でも 80% に増やします。
- より高い高度で飛行する: 多くの場合、より高い高度で飛行することで結果が改善します。
建築物の 3D 再構築
建築物の 3D 再構築モデルを作成するには、適切な画像取得計画が必要です (図 2)。
- カメラのピッチを調整して、再構築するオブジェクトが画像の大部分を占め、再構築の対象外であるオブジェクトは画像のごく一部となるようにします。すべてのミッションに同じカメラピッチ角を適用することはできません。
- 建物の周囲をさらに 2 周、3 周と飛行し、周回ごとに飛行高度を上げ、カメラの角度を小さくします。
メモ: 斜め画像の詳細については「鉛直画像と斜め画像」(英語) をご覧ください。
- 画像の重複率が十分であることを確保するため、オブジェクトのサイズと距離に応じて角度が 5 〜 10 度変わるごとに画像を 1 枚撮影することを推奨します。
メモ:
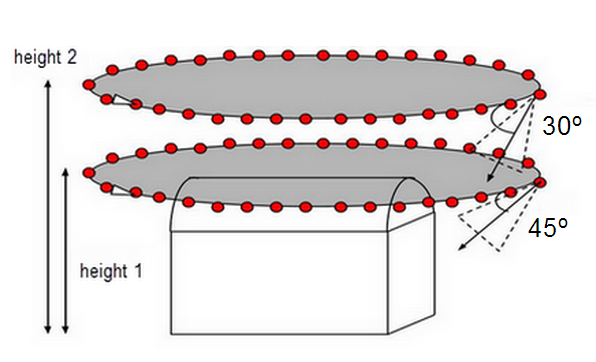
図 2. 建築物撮影における理想的な撮影計画
特殊なケース
このセクションでは、雪、砂、湖などのマッピングが難しい地形に関するヒントをいくつか紹介します。
雪と砂: 広範囲に渡って均一なエリアであるため、視覚的な情報が非常にすくないことから、以下の変更を適用することを推奨します。
- 重複率を増やす: オーバーラップを 85% 以上と、サイドラップを少なくとも 70 % に増やす
- 露出設定を適切に設定する: 各画像で可能なかぎりコントラストが高くなるようにします。
水面: 広範囲に渡って均一なエリアであるため、視覚的な情報がほぼ存在しません。水面の太陽の反射や波は、視覚的なマッチングには使用できません。
- 海洋の再構築モデルの作成は不可能です。
- 川や湖などの他の水面を再構築するには、各画像には陸地や他の静止したオブジェクトが含まれている必要があります。より高い高度で飛行することで、より多くの陸地の特徴を捉えることができる可能性があります。
コリドー マッピング
鉄道、道路、または川などのコリドー型の対象エリアをマッピングするには、少なくとも 2 つの飛行経路が必要です (図3)。GCP は必須ではありませんが、再構築モデルの精度を向上させるために使用が推奨されます。コリドー マッピングにおける GCP の数と分布の詳細については「コリドー マッピングにおけるグラウンド コントロール ポイント (GCP) の数と分布」(英語) をご覧ください。
2 つの経路で画像を取得する場合は、少なくとも 85% のオーバーラップと少なくとも 60% のサイドラップを確保することが推奨されます。
鉛直画像または斜め画像を使用することが可能で、平坦な地形の場合は、鉛直画像の使用が推奨されます。
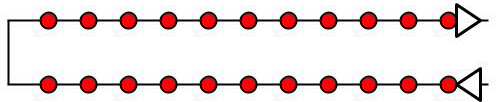
図 3. コリドー マッピングで進路を 2 つ使用した際の画像取得計画
経路を 2 つ使用した画像取得計画が実行できない場合は、以下の条件を満たせば、1 つの経路を使用した画像取得計画が使用できます (図 4)。
- 重複率が十分に高いこと: 少なくとも 85% のオーバーラップが必要です。
- グラウンド コントロール ポイント (GCP) の定義: 飛行経路に沿ってジグザグ状に定義します。

図 4. 単一経路の飛行は推奨されません
大規模垂直オブジェクトの 3D 再構築
縦長で細長いオブジェクトの 3D モデルの再構築には、決まった画像取得計画が必要です (図8)。
- 建造物の近くを飛行します。
- 異なる高度で建造物の周りを複数回、周回飛行します。
- 画像間の重複率を高くします。同じ高さで撮影された画像間の重複率を 90 % にし、異なる高さで撮影された画像間の重複率を 60% になることを推奨します。
- プロジェクト エリア外の背景のオブジェクトを含む、画像フレーム内のすべての対象物にフォーカスが当たっているようにします。
- 画像にジオロケーションが付与されていることを推奨します。

電力塔

再構築された電力塔
図8. 電力塔の画像取得計画
メモ: ポールや塔などの建造物のマッピングや計測に関しては「ポールと塔構造物をマッピング・計測する方法 - PIX4Dmapper」(英語) をご覧ください。
警告: PIX4Dcloud/PIX4Dcloud Advanced はグレースケールの JPG 画像のみをサポートします。結果にはスケールの問題が含まれる可能性がある点にご留意ください。
適切な地上解像度 (GSD) で画像を撮影します。
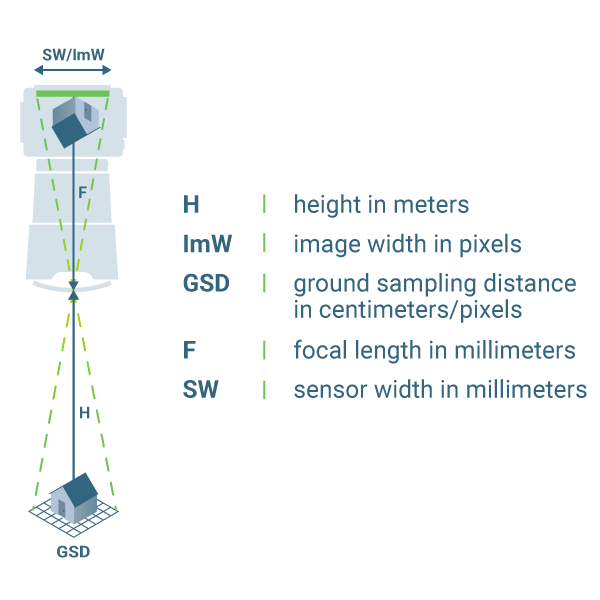
このセクションでは、地上解像度 (GSD) とその計算方法について説明します。
地上解像度 (GSD) とは、隣り合う 2 つのピクセルの中心間の地表面上で測定された距離を示します。画像の GSD の値が大きくなるほど、画像の空間分解能が低くなり、細部が見えにくくなります。
GSD は、以下の要素に基づいて計算されます。
- 飛行高度/地表またはオブジェクトからの距離 (H)
- カメラの仕様:
-
- 画像の幅(ImW)
- センサーの幅(SW)
- 焦点距離(F)
情報:
- GSD 自動計算ツール: ツール - GSD 計算機 (英語)
- 希望する GSD とマッピング対象の地形を考慮したカメラの焦点距離と飛行高度を選択する方法: 希望する GSD とマッピング対象の地形を考慮したカメラの焦点距離と飛行高度を選択する方法 - PIX4Dmapper (英語)
- 異なる飛行高度で撮影した画像を処理する方法: 異なる高度/GSD で撮影された画像を処理する方法 (英語)
画像取得を開始する前に GSD の値を決定し、プロジェクトの要件に合わせて飛行高度とカメラの仕様を調整することが重要です。たとえば、対象エリアの詳細な 3D 再構築が必要な場合は、対象のオブジェクトに近づいて (小さい GSD) 飛行することが推奨されます。一方、非常に詳細な結果が必要ではない広範囲のエリアをカバーする場合は、高い高度 (大きい GSD) で飛行することで、取得時間やバッテリーの減りを大幅に削減できるとともに、処理時間も大幅に短縮できます。
例:
- GSD が 5 cm の場合、画像内の 1 ピクセルは地上で直線 5 cm に相当します (5×5 = 25 平方 cm)。
- GSD が 30 cmの場合、画像内の 1 ピクセルは地上で直線 30cm に相当します (30×30 = 900 平方 cm)。


注: 一定の高度で飛行したとしても、プロジェクト内の画像の GSD は一定ではない場合があります。これは、地形の高低差や撮影時のカメラの角度の変化が原因です。オルソモザイクは 3D 点群とカメラの位置を使用して作成されるため、 平均 GSD が算出されて使用されます。
詳細で鮮明かつ十分なコントラストのある画像を撮影します。
詳細で鮮明かつ十分なコントラストのある画像を撮影するには、以下の点を考慮します。
カメラの設定
シャッター スピード、絞り、および ISO はオートに設定します。画像がぼやけていたりノイズを含む場合は、これらのパラメータを手動で設定することが推奨されます。
シャッター スピード、絞り、および ISO 感度は相互に関連しています。処理においては、画像は鮮明でノイズの量は最小限であるべきです。このような画像は、シーンが十分に明るく (雲が点在する状況は避ける)、カメラのパラメーターが適切に調整されている場合に得られます。シーンの明るさが十分ではない場合、画像のノイズが増え、鮮明さが低下し、結果の精度が下がります。
- 目安として、シャッター スピードを固定し、ノイズの少ない画像を生成するように ISO を低い値に設定し、絞りはシーンの明るさの変化に対応するためにオートに設定します。設定のバランスが適切でない場合は、露出オーバーの画像、または露出アンダーの画像が得られる可能性があります。
シャッター スピードは固定し、中程度の速度 (目安: 1/300 秒 ~ 1/800 秒) に設定することが推奨されますが、画像がぼやけることのない十分な速さである必要があります。画像の 5% 以上が特定の方向にブレている場合は、シャッター スピードをわずかに速める際のよい目安になります。
ISO の値はできるだけ低く設定 (最小 100) する必要があります。ISO の設定の値が高いと、一般的には画像にノイズを導入し、生成物の品質を劇的に低下させます。
絞りの最小値と最大値はレンズに依存します。絞りを大きく開くほど f 値は小さくなり、たとえばf2.7 のような設定では多くの光を取り込むことができます。シャッター スピードと ISO の両方が調整されている場合は、絞り値 (f) をオートに設定することを推奨します。 - Pix4Dmapperのアルゴリズムに干渉するため、電子式および機械式のブレ補正機能は、無効にします。
- 推奨されるフォーカス モードはマニュアル (無限遠) です。このフォーカス モードを使用すると、空中プロジェクトでは常にピントの合った画像が得られます。地上プロジェクトでは焦点距離が長い場合はピントが合わない結果となる可能性があります。
処理に影響を及ぼす、正しくないカメラ パラメーターや不適切な機材に起因する画像の問題を以下に示します。





シャッター スピードが遅いことによるブレ
ISO 感度が高いことによるノイズ
露出オーバーまたは露出アンダー (不適切な絞りおよび/またはシャッター スピード)
電子式または機械式の画像ブレ補正による歪み
ローリング シャッターによる歪み
データセットに適した処理オプションを選択します。
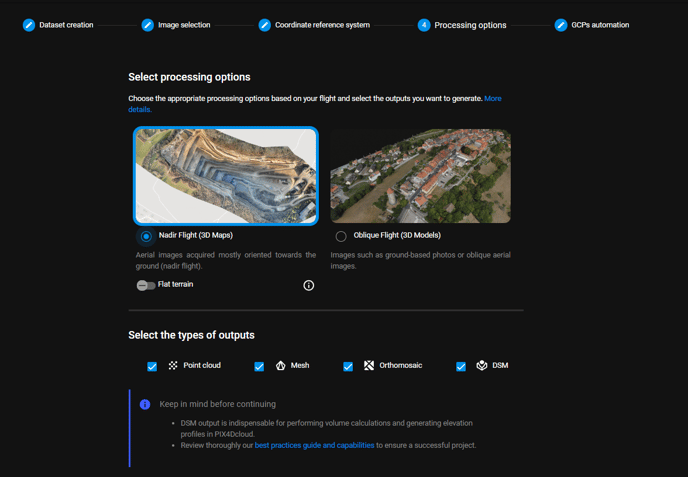
PIX4Dcloud では、処理対象の飛行の種類に応じて異なる処理オプションが提供されています。推奨されるオプションは以下の通りです:
| 飛行の種類とデータセット | 推奨される処理オプション |
| 鉛直 RGB 画像 | 鉛直飛行 (3D マップ) |
| 斜め RGB 画像 | 斜め飛行 (3D マップ) |
| 地上 RGB 画像 | PIX4Dcatch からアップロード |
| 360° 画像 | サポートなし |
| マルチスペクトル画像 | サポートなし |
| 農業地帯の RGB 画像 | 平坦な地形での鉛直飛行 (3D マップ) |
| サーマル画像 (*) | サポートなし |
* サーマル RPJG 画像はサポートされていません。JPG グレースケール画像はサポート対象ですが、放射測定やスケール、キャリブレーションの精度に問題が生じる可能性があるため、使用は推奨されません。
情報: PIX4Dcloud/PIX4Dcloud Advanced 単体では RJPEG 画像の処理をサポートしていません。これらの画像を処理するには、PIX4Dmapperを使用してください。詳細については「PIX4Dcloud/PIX4Dcloud Advanced と PIX4Dmapper を使用してサーマル画像を処理する方法」(英語) をご覧ください。
警告: 飛行に対して間違った処理オプションを選択すると、望ましくない結果につながる可能性があります。
警告: 360°のパノラマ画像の処理は PIX4Dcloud ではサポートされていません。
詳細については「新規データセット > 処理オプション > テンプレート」をご覧ください。
(任意) GCP を使用することまたは RTK ドローンで画像を撮影することで絶対精度を向上させます。
PIX4Dcloud を使用する場合の最終成果物 (オルソモザイク、DSM および点群) の予想される絶対精度は、以下の要因に依存します。
画像ジオロケーション精度
ドローンの種類
x,y の予想精度
z の予想精度
標準ドローン
5 - 10 m
10 m
RTK/PPK ドローン
1 cm + -2 ppm
2 cm + - 2 ppm
*ppm: 百万分率 (1mm/km)
例: プロジェクトのエリアから 5 km 離れた基地局から RTK 補正を受信する RTK ドローンの場合
- X,Y 精度 → 1 cm + 2 × (5 mm) = 1.1 cm
- Z 精度 → 2 cm + 2×(5 mm) = 2.2 cm
詳細については「空飛ぶカメラから測量ツールへ: RTK/PPK ドローンの進化 (英語)」をご覧ください。
GCPの使用
グラウンド コントロール ポイント (GCP) を使用する場合、標準ドローンであっても、結果の絶対精度は GCP の絶対精度と同等になります。たとえば、GCP の精度が約 2 - 3 cm である場合、最終的な結果として同程度の絶対精度が期待できます。
詳細については「RTK/PPK ドローンは GCP よりも高い精度が得られるか?」をご覧ください。
PIX4Dcloud Advanced には GCP 自動検出機能が含まれており、GCP を使用して精度を向上できます。 この機能に関する要件をご確認ください。
以下の要件が満たされた場合、PIX4Dcloud は GCP を自動検出できます。
アクセス: この機能は PIX4Dcloud Advanced でのみ利用可能です。
GCP 自動検出機能のアルゴリズムが正常に機能するには、画像と GCP に関する以下の要件を満たす必要があります。詳細およびベスト プラクティスについては「自動ターゲット検出 - GCP 自動検出機能 (英語)」をご覧ください。
画像の要件
- 画像の品質が良好であること (ぼやけていたりコントラストが低い画像はアルゴリズムの失敗につながる)
- 画像は WGS84 (EPSG:4326) でジオロケーションされていること
- 画像のジオロケーションの精度は、水平方向で 5 m 以下、垂直方向で 10 m 以下であること
- 画像は鉛直方向またはやや傾斜した角度で撮影されていること
GCP の要件
- プラス型、X 型、またはは Propeller 社の AeroPoint もサポートしていること
- 推奨されるサイズは、最小でもプロジェクトの平均地上解像度の 20 倍
例: プロジェクトの平均地上解像度が 2.5 センチ (1 インチ) の場合は、推奨されるターゲットのサイズは 50 センチ (20 インチ) です。
- 白黒のターゲットに対応。場合によっては、他の色でも処理可能
- GCP は、それぞれ最低でも 10 メートル離して配置すること
- GCP に、投影座標系が指定されていること

警告:GCP 自動検出機能のアルゴリズムが失敗した場合は、その処理では GCP は考慮されません。
PIX4Dcloud は処理のための最適化された既定のオプション セットを提供しています。
- 鉛直飛行 (3D マップ): このオプションは、ほとんどが地表方向を向いている、重複率の高いグリッド飛行計画で撮影された空撮 RGB 画像に最適です。一般的には、砕石や土地台帳の作成に使用されます。
- 平坦な地形: 重複率の高いグリッド飛行計画で撮影された、農地などの平坦な地形での空撮 RGB 画像に最適です。
- 斜め飛行 (3D モデル): 自由飛行で撮影された斜め空撮画像などの重複率の高いあらゆる RGB 画像 に最適です。一般的には、建物や物体の 3D モデルまたは点検用の 3D モデルに使用されます。
情報: 正しく飛行し、画像の品質が十分であっても既定のパラメーターが誤った結果を生成する可能性があります。
注: 処理オプションを変更する必要がある場合、PIX4Dmatic や PIX4Dmapper などの他のソフトウェア パッケージを代わりに使用することもできます。
PIX4Dcloud は再構築モデルを生成し表示することはできますが、編集することはできません。
PIX4Dcloud は、オルソ写真、数値地表モデル (DSM)、NDVI 指数、点群および 3D メッシュを含むさまざまな出力の可視化を可能にする Web ベースのソフトウェアです。これらの出力結果は PIX4Dcloud 内では編集できない点にご留意ください。
編集作業が必要な場合は、PIX4Dmapper、PIX4Dmatic、または PIX4Dsurvey などの他の製品の使用をお勧めします。
PIX4Dcloud が処理できるデータセットのサイズには上限があります。
PIX4Dcloudは、プロジェクトの特性や処理オプション、要求された出力に応じて一定数の画像を正常に処理できます。
情報: PIX4Dcloud または PIX4Dcloud Advanced ライセンスを保有するユーザーは 1 プロジェクトあたり最大 4000 枚の画像を処理できます。詳細については「PIX4Dcloud - よくある質問」をご覧ください。
警告:
- PIX4Dcloud は最大 4000 枚の画像をサポートしていますが、すべてのケースでこの枚数が処理できるとは限りません。画像サイズ、重複率、プロジェクトの形状、生成する出力によっては、画像が 4000 枚未満であっても処理に失敗する可能性もあります。これは特に、大判カメラ (42 MP 以上) または重複率の高いプロジェクト (斜め飛行) において当てはまります。詳細についてはこちらをご覧ください。
- PIX4Dcloud は、12 時間を超える画像のアップロードには対応していません。
PIX4Dcloud は一定のサイズまでの再構築モデルを表示できます。
データセットは、アップロードされた結果のみで構成することができます。この場合、画像は処理されませんが、アップロードされたファイルは Web 上での表示と最適化のために処理されます。
アップロードして表示が出来るフォトグラメトリ ファイルは以下のとおりです。
- オルソモザイク (.GeoTIFF)
- DSM (.GeoTIFF)
- 指標 (.GeoTIFF): NDVI マップまたはその他の指標マップ
- 点群 (.las, .laz)
- 3D テクスチャ メッシュ (.obj)
ファイルのアップロードには、ファイル サイズとファイル形式に関していくつかの制限があります。
- オルソモザイク: 単一の GeoTIFF ファイルをサポート、最大 50 GB
- DSM: 単一の GeoTIFF ファイルをサポート、最大 50 GB
- 指標: 単一の GeoTIFF ファイルをサポート、最大 50 GB
- 点群: 単一の las ファイルまたは laz ファイルをサポート
- 3D テクスチャ メッシュ: 単一の OBJ、MTL、JPG ファイルを組み合わせたファイル セットをサポート
- OBJ: 最大 1 GB
- JPG: 最大 16k × 16k
PIX4Dcloud では処理に既定のパラメーターが使用されます。
PIX4Dcloud はフォトグラメトリの専門知識がなくても簡単に利用できるユーザーフレンドリーな Web ベースのソフトウェアです。様々な飛行シナリオに合わせた既定のパラメーターのセットを使用します。これらのパラメーターは調整できません。
警告: 適切に飛行し、高品質な画像を使用した場合であっても、既定の設定の制限により、正確な結果が得られないことがあります。そのような場合には、PIX4Dmatic や PIX4Dmapper などの代替ソフトウェアを使用することで処理オプションをより柔軟に調整することができます。
情報: データセットがベスト プラクティスの基準に満たないか、ページ中で説明される性能を超える要件が必要となる場合は、処理許容量またはクレジットは消費され、払い戻しはされません。