PIX4Dmapper es un software de procesamiento de imágenes basado en la detección automática de miles de puntos comunes entre imágenes. Cada punto característico encontrado en una imagen se conoce como punto clave. Cuando se determina que 2 puntos clave en diferentes imágenes son iguales, estos son puntos clave emparejados. Cada grupo de puntos clave que se emparejaron correctamente generará un punto 3D. Cuando existe un alto solape entre 2 imágenes, el área común capturada es mayor y se pueden emparejar más puntos clave. Mientras más puntos clave haya, mayor es la precisión con la que se pueden calcular los puntos 3D. Por lo tanto, la regla principal es mantener un alto solape entre las imágenes.
Debido a que el plan de adquisición de imágenes tiene un alto impacto en la calidad de los resultados, es importante diseñarlo minuciosamente.
Si el procesamiento Res. rápida/baja no arroja buenos resultados, es muy probable que el conjunto de datos no sea el adecuado y sea necesario adquirir imágenes nuevamente. En algunos casos, la opción Res. rápida/baja falla y el procesamiento completo reconstruye el modelo con éxito.
Para más información sobre la diferencia entre Res. rápida/baja y el procesamiento completo: Procesamiento completo vs. Resolución rápida / baja.
Plan ideal de adquisición de imagen
El plan ideal de adquisición de imagen depende del tipo de terreno / objeto que se va a reconstruir:
- Caso general: Para proyectos que no incluyen bosques, nieve, lagos, campos agrícolas y/o otros terrenos que son difíciles de reconstruir.
- Bosque y vegetación densa: Para proyectos con áreas cubiertas por bosques o vegetación densa.
- Terreno plano con campos agrícolas: Para terreno plano con contenido visual homogéneo como campos agrícolas.
- Reconstrucción de edificios: Para modelado 3D de edificios.
- Casos especiales: Para superficies con nieve, arena y agua (océanos, lagos, ríos, etc.).
- Mapeo de corredor Para proyectos con áreas de interés lineales (caminos, ríos, etc.)
- Vuelos múltiples: Para proyectos con imágenes tomadas mediante vuelos múltiples.
- Reconstrucción de una ciudad (fachadas visibles): Para modelado 3D de áreas urbanas.
- Reconstrucción interior en 3D: Para modelado en 3D del interior de edificios.
- Reconstrucción combinada: Para conjuntos de datos combinados (interior/exterior, aéreos/terrestres y/o nadir/oblicuo).
- Reconstrucción de objetos verticales grandes: Para modelado 3D de objetos como torres de energía eléctrica, turbinas de viento, etc.
- Reconstrucción de túneles: Para modelado 3D de un túnel.
- Objetos pequeños: Para modelado 3D de objetos pequeños.
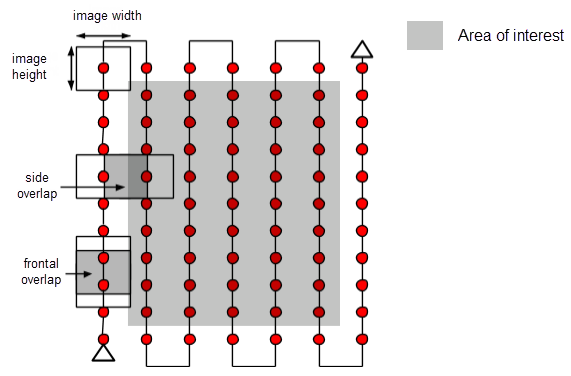
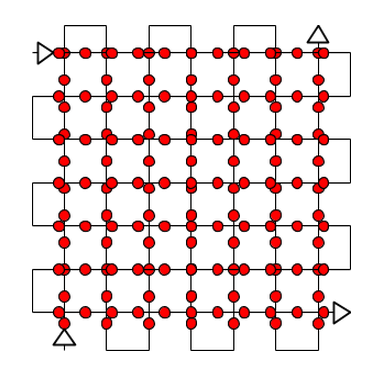
El solape recomendado en la mayoría de los casos es de al menos 75 % solape frontal (con respecto a la dirección del vuelo) y al menos 60 % solape lateral (entre trayectorias de vuelo). Se recomienda tomar las imágenes con un patrón cuadriculado regular (Figura 1). La cámara debe mantenerse en lo posible a una altura constante sobre el terreno / objeto para garantizar el tamaño de pixel en el terreno (GSD) deseado.
Es frecuente que los árboles y la vegetación densa tengan una apariencia muy diferente entre imágenes solapadas debido a su geometría compleja (miles de ramas y hojas). Por tanto, es difícil extraer puntos característicos comunes (puntos clave) entre las imágenes. Para lograr buenos resultados, se recomienda usar un plan de adquisición de imagen cuadriculado como el que se describe en la sección Caso general aplicando los siguientes cambios:
- Aumentar el solape entre imágenes al menos a 85 % solape frontal y mínimo 70 % solape lateral.
- Aumentar la altura del vuelo: A una altitud mayor la distorsión de la perspectiva es menor (causando así menos problemas de apariencia) y las propiedades visuales de la vegetación densa son mejores. En otras palabras, es más sencillo detectar similitudes visuales entre imágenes solapadas en dichas áreas. La altura del vuelo en combinación con la resolución de pixeles de la imagen y la longitud focal determinan el tamaño del pixel en el terreno (resolución espacial) de las imágenes. Se obtienen mejores resultados con un tamaño de pixel en el terreno (GSD) mayor a 10 cm/pixel.
Para más información sobre cómo mejorar los resultados de las áreas de vegetación densa al seleccionar las opciones de procesamiento correctas: ¿Cómo mejorar los archivos de salida en áreas de vegetación densa?
Terreno plano con campos agrícolas
En los casos en los que el terreno es plano con un contenido visual homogéneo como los campos agrícolas, es difícil extraer puntos característicos comunes (puntos clave) entre las imágenes. Para lograr buenos resultados, se recomienda usar un plan de adquisición de imagen en cuadrícula como se describe en la sección Caso general y aplicar los siguientes cambios:
- Aumentar el solape entre imágenes al menos a 85 % solape frontal y mínimo 70 % solape lateral.
- Vuelo a más altura. En la mayoría de los casos, volar a mayor altura mejora los resultados.
- Tener una geolocalización de imágenes precisa y usar la Plantilla de agricultura. Para mayor información sobre la Plantilla de>agricultura (Ag): Plantillas predeterminadas para opciones de procesamiento.
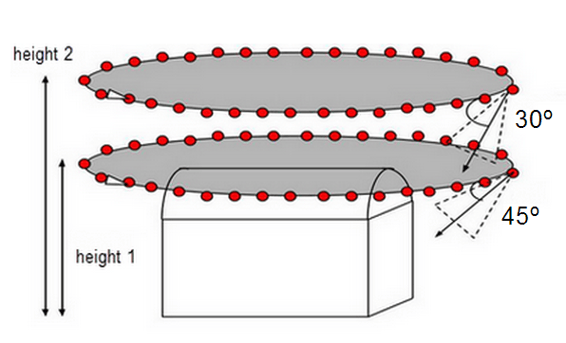
Reconstruir edificios en 3D requiere de un plan de adquisición de imágenes específico (Figura 2):
- Vuele por primera vez alrededor del edifico con la cámara en un ángulo de 45°.
- Vuele una segunda y una tercera vez alrededor del edificio aumentado la altura del vuelo y disminuyendo el ángulo de la cámara en cada vuelta.
- Se recomienda tomar una imagen cada 5 a 10 grados para garantizar suficiente solape, dependiendo del tamaño del objeto y la distancia a este. Para distancias más cortas y objetos más grandes se requieren imágenes cada menor número de grados.
- La altura del vuelo no debe aumentarse más de dos veces entre vuelos, ya que diferentes alturas llevan a resoluciones espaciales diferentes. Para más información: ¿Puede PIX4Dmapper procesar imágenes tomadas a diferentes alturas de vuelo?
- PIX4Dmapper genera una nube de puntos de alta calidad para imágenes oblicuas de edificios. Sin embargo, no se genera un ortomosaico, cuando la plantilla seleccionada es Modelos 3D: Plantillas predeterminadas de opciones de procesamiento.
Las imágenes deben tener suficiente solape en cada conjunto de datos y entre conjuntos de datos. En dichos casos es altamente recomendable usar GCP o puntos de conexión manual para ajustar adecuadamente los diferentes conjuntos de imágenes.
Esta sección ofrece algunas sugerencias para terrenos difíciles de mapear como aquellos con nieve, arena, lagos, etc.
La nieve y la arena tienen poco contenido visual debido a las grandes áreas uniformes. Por tanto:
- Use un solape alto: Por lo menos 85 % de solape frontal y 70 % de solape lateral.
- Establezca los ajustes de exposición en consonancia para obtener tanto contraste como sea posible en cada imagen.
Las superficies de agua casi no tienen contenido visual debido a las grandes áreas uniformes. El reflejo del sol en el agua y las olas no se pueden usar para emparejamiento visual.
- Los océanos son imposibles de reconstruir.
- Para reconstruir otras superficies de agua como ríos o lagos, es necesario que cada imagen tenga características de tierra. Volar a más altura puede ayudar a incluir más características de tierra.
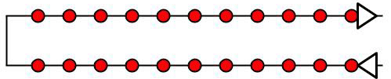
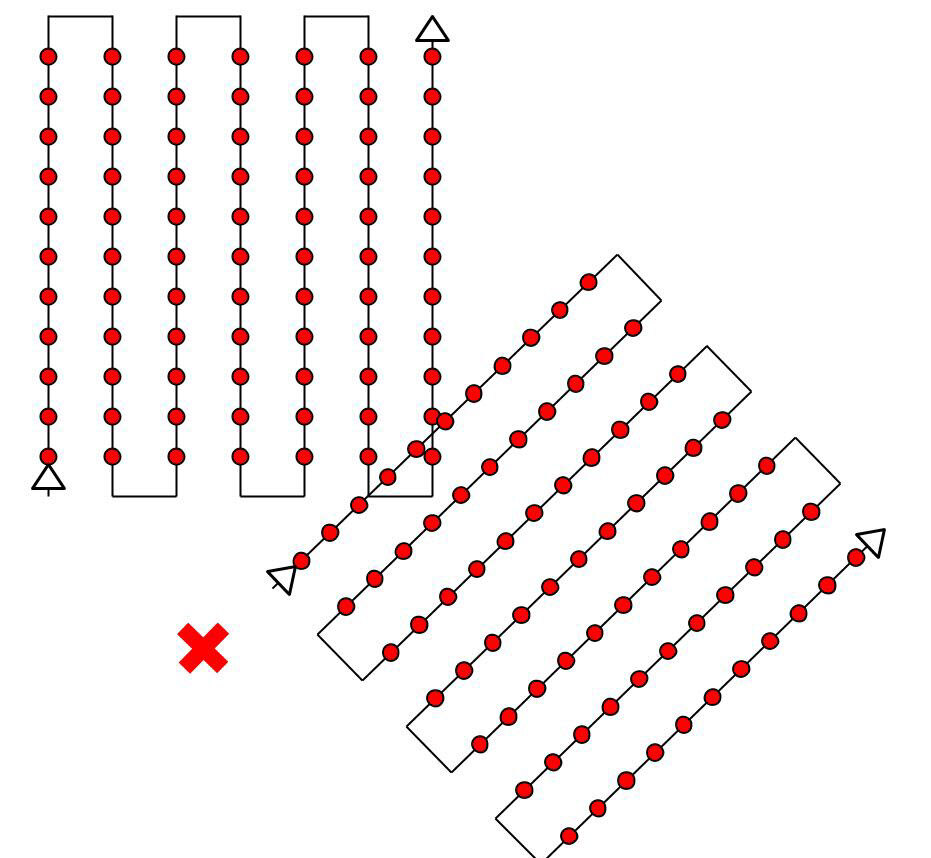
Mapear corredores como vías de ferrocarril, carreteras o ríos requiere de por lo menos 2 líneas de vuelo (Figura 3). No se requieren GCP, pero se recomiendan para mejorar la georeferencia y la precisión de la reconstrucción. Para más información sobre el número y la distribución de los GCP en un mapeo de corredor: Número y distribución de puntos apoyo (GCP) en mapeo de corredores.
Para una trayectoria doble se recomienda usar por lo menos 85 % solape frontal y al menos 60 % solape lateral.
Es posible usar imágenes de nadir u oblicuas (con un ángulo entre 0° (nadir) y 45° apuntando a ambas trayectorias al centro del corredor). En el caso de terreno plano se recomienda usar imágenes de nadir.
Si no fuera posible un plan de adquisición de imagen de trayectoria doble, se puede usar un plan de adquisición de imagen de una sola ruta si (Figura 4):
- El solape no es suficientemente alto: El solape frontal debe ser de por lo menos 85 %.
- Los puntos de apoyo (GCP) se definen en zig zag a lo largo de la línea de vuelo.
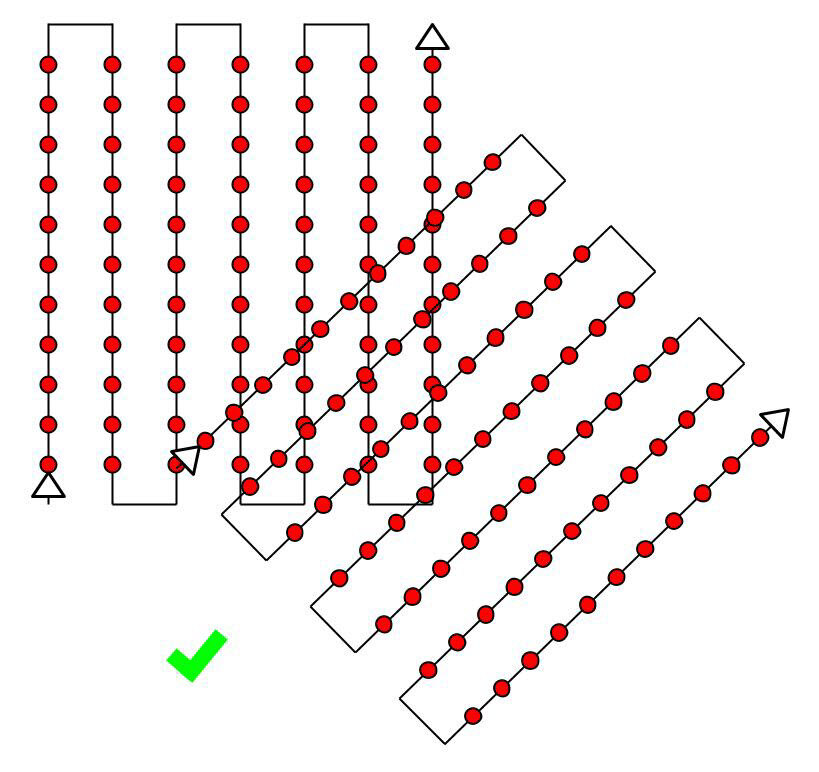
PIX4Dmapper puede procesar imágenes tomadas en múltiples vuelos. Al diseñar diferentes planes de adquisición de imagen, asegúrese de que:
- Cada plan captura las imágenes con suficiente solape.
- Haya suficiente solape entre 2 planes de adquisición de imagen (Figura 5).
- Los diferentes planos se toman en lo posible bajo las mismas condiciones (dirección del sol, condiciones climáticas, no edificios nuevos, etc.
Hay una forma especial de procesar conjuntos de datos tomados con múltiples vuelos, siguiendo instrucciones paso a paso: Procesamiento de conjuntos de datos grandes.
Reconstrucción de ciudad (fachadas visibles)
La reconstrucción en 3D de áreas urbanas requiere de un plan de adquisición de imagen de doble cuadrícula para que todas las fachadas del edificio (norte, oeste, sur, este) sean visibles en las imágenes. El solape debe ser el mismo que el del Caso general.
Para que las fachadas sean visibles, las imágenes se deben tomar con un ángulo de entre 10° y 35° (0°, la cámara mira hacia abajo). Si se requiere mucho detalle deben combinarse las imágenes aéreas y terrestres.
Las imágenes deben tener suficiente solape en cada conjunto de datos y entre conjuntos de datos. En dichos casos es altamente recomendable usar GCP o puntos de conexión manual para ajustar adecuadamente los diferentes conjuntos de imágenes.
Para la reconstrucción interior se recomienda usar imágenes terrestres. Es necesario un solape alto (90 %). Por tanto, es recomendable usar una cámara con lente ojo de pez.
Los puntos de conexión manual mejoran la reconstrucción y ayudan a ajustar apropiadamente el modelo. Más información: seminario web.
Es posible combinar interior/exterior, aéreo/terrestre y/o nadir/oblicuo. Cualquier combinación es posible.
Las imágenes deben tener suficiente solape en cada conjunto de datos y entre conjuntos de datos. En dichos casos es altamente recomendable usar GCP o puntos de conexión manual para ajustar adecuadamente los diferentes conjuntos de imágenes. Más información: seminario web.
Reconstrucción de objetos verticales grandes
La reconstrucción en 3D de objetos como torres de energía eléctrica, turbinas de viento, etc. requiere de un plan de adquisición de imagen específico (Figura 8):
- Vuelo cercano a la estructura.
- Vuele varias veces alrededor de la estructura a diferentes alturas.
- Las imágenes deben tomarse con alto solape: Solape del 90 % entre las imágenes que se tomen a la misma altura y solape del 60 % entre imágenes que se tomen a alturas diferentes.
- El ángulo óptimo de la cámara para el círculo superior es de 45 grados. Al apuntar al suelo, es más sencillo emparejar el contenido de las imágenes y se obtienen mejores resultados.
- Las imágenes deben enfocarse lo más posible (enfocar tanto el objeto principal como el fondo).
- Se recomienda usar drones que capturen las imágenes con geolocalización.
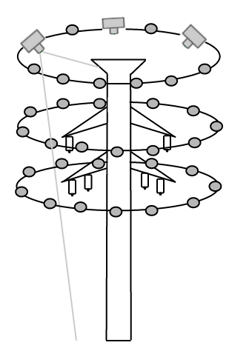
Torre de energía eléctrica
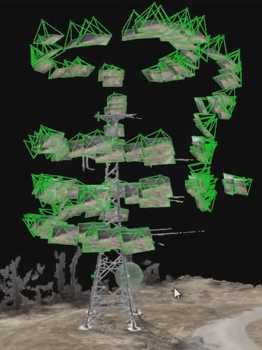
Torre de energía eléctrica reconstruida en rayCloud
PIX4Dmapper puede reconstruir túneles. El mayor reto para la reconstrucción de túneles son las condiciones de iluminación. Si la iluminación es buena, ya sea con luz natural (si el túnel no es muy largo) o artificial , la reconstrucción podría ser muy buena.
En el caso de túneles oscuros se recomienda usar un trípode.
- Usar cámara con lente ojo de pez.
- Tomar imágenes en más de una línea (evitar tomar en una sola trayectoria). Si no fuera posible elaborar un plan de adquisición de múltiples trayectorias, una sola podría funcionar. En este caso es altamente recomendable usar GCP.

Figura 9. Puntos de conexión automática de un túnel.