PIX4Dcatchは、モバイル端末を最大限に活用し、以下のものを駆使しながら地形データを取得する強力なツールです。
- 画像取得
- LiDAR取得
- RTK対応デバイスによる RTK精度の ジオロケーション
PIX4Dmatic は、これらのデータセットの処理に適しており、それぞれのユニークな性質を組み合わせて活用するための多くの機能が組み込まれています。
本記事の内容
PIX4DcatchのデータセットをPIX4Dmaticにインポートする方法
PIX4DmaticでPIX4Dcatchのプロジェクトを処理する方法
キャリブレート
深度点群
高密度化
深度・高密度の融合
メッシュ作成
DSM
オルソモザイク
エクスポート
PIX4DcatchのデータセットをPIX4Dmaticにインポートする方法
モバイル デバイスで PIX4Dcatch プロジェクトが完成したら、PIX4Dmatic を使用してエクスポートおよび処理する準備が整います。
- PIX4Dcatch アプリから
 PIX4Dmatic で処理するプロジェクトを開きます.
PIX4Dmatic で処理するプロジェクトを開きます. - すべてのデータをエクスポートをタップしてモバイルデバイスからプロジェクトをエクスポート
 し、ローカルフォルダに保存します。
し、ローカルフォルダに保存します。

詳しくはこちらPIX4Dcatchのデータをエクスポートする(iOS)。
- PIX4Dmatic
 を開きます。
を開きます。 - 新規にプロジェクトを作成する場合は、プロジェクトデータをインポートしてください。 _inputsフォルダには、キャプチャしたすべてのデータが格納され、プロジェクト名_inputs という名前が付けられています。 画像キャプチャに使用するデバイスによって、このフォルダに表示されるファイルが異なります。
LiDAR 対応デバイスでキャプチャされたプロジェクト。
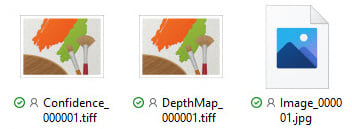
LiDAR対応デバイスで撮影したプロジェクトをインポートする場合、Confidence.tiffs、DepthMap.tiffs、Image.jpgをすべてインポートします。 Confidence.tiffとDepthMap.tiffはLiDARの深度データ、Image.jpgは画像の内容を表すファイルです。
LiDAR データのないプロジェクト

LiDAR 対応デバイスなしでキャプチャされたプロジェクトをインポートする場合、 _inputs フォルダには、画像コンテンツを反映する Image.jpg が含まれます。
PIX4DmaticでPIX4Dcatchのデータセットを処理する方法
新しいプロジェクトを開いてすべてのデータをインポートすると、PIX4Dmatic は処理の準備が整います。 ほとんどの場合、デフォルトの処理オプションを使用して PIX4Dcatch プロジェクトを処理できます。 選択できる PIX4Dcatch 固有の設定がいくつかあり、各セクションで強調表示されています。
キャリブレート
キャリブレートは、処理の最初のステップです。 最初に、 信頼性の高い位置情報とオリエンテーションパイプラインを使用して PIX4Dcatch テンプレートを選択することをお勧めします。

LiDARの深度データで取り込まれたプロジェクトでは、深度マップを使用することができ、デフォルトで有効になっています。 これは、必要に応じてオフに切り替えることができます。 有効にすると、PIX4Dcatch で生成された深度マップがより適切なキャリブレーションに使用されます。
深度点群

深度点群 LiDAR 深度マップから生成されます。 このオプションは、LiDAR 対応デバイスでキャプチャされた PIX4Dcatch プロジェクトでのみ使用できます。
高密度化
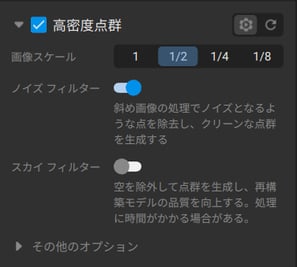
高密度化 ステップでは、画像から高密度の点群を生成します。 デフォルトの設定に加えて、PIX4Dcatchのプロジェクトに直接役立つオプション選択が2つあります。 それは、ノイズフィルターとスカイフィルターです。
深度と高密度点群の融合
深度と高密度の融合 オプションは、画像から生成された点群を LiDAR 深度マップから生成された点群と結合します。

従来のフォトグラメトリー技術では復元が難しかった複雑な形状や均質なテクスチャーも、融合された点群を使うことで密度が高く、より完全なものになることが多いです。
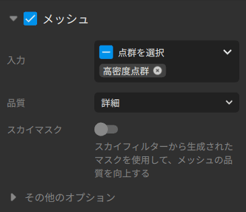
メッシュ
3D メッシュを生成する場合に選択します。 入力およびテンプレート欄には、PIX4Dcatch 固有の選択項目があります。
-
インプット
LiDAR 深度マップを含む PIX4Dcatch データを処理する場合、次の点群のいずれかを使用してメッシュを生成できます。
- 高密度点群
- 深度点群
- 深度・高密度融合の点群
-
テンプレート
地上プロジェクト用に最適化されているPIX4Dcatch テンプレートを選択します。
メッシュの設定はすべて、処理オプション - メッシュにまとめられています。 被写体に応じて、最も正確な復元が可能なオプションを選択します。
数値表層モデル(DSM)
数値表層モデル(DSM)を生成する場合に選択します。 入力フィールドには、PIX4Dcatch 固有の選択項目があります。

-
インプット
LiDAR 深度マップを含む PIX4Dcatch データを処理する場合、DSM は次のポイント クラウドのいずれかで生成できます。
- 高密度点群
- 深度点群
- 深度・高密度融合の点群
DSMの設定はすべて、DSM - PIX4Dmaticにまとめられています。 被写体に応じて、最も正確な復元が可能なオプションを選択します。
オルソモザイク
オルソモザイクを生成する場合に選択します。 斜めトグルと虚像排除トグルは、PIX4Dcatchプロジェクトの品質を向上させることができます。
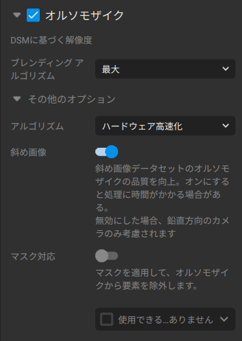
オルソモザイクの設定方法は、オルソモザイク - PIX4Dmaticにまとめられています。 被写体に応じて、最も正確な復元が可能なオプションを選択します。
エクスポート
各処理オプションや品質レポートについて必要なエクスポートを選択します。
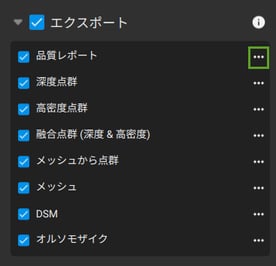
LiDARの深度マップを含むPIX4Dcatchデータを処理する場合、処理オプションを選択すると、各点群.lasオプションがエクスポートできるようになります。 DSM とオルソモザイクをエクスポートする場合、考慮すべきオプションがさらにあります。 これらのエクスポート設定の概要については、それぞれの記事で紹介しています。(DSM、オルソモザイク)