Issue
There is more than one block of calibrated images after processing step 1 in PIX4Dmapper.
Description
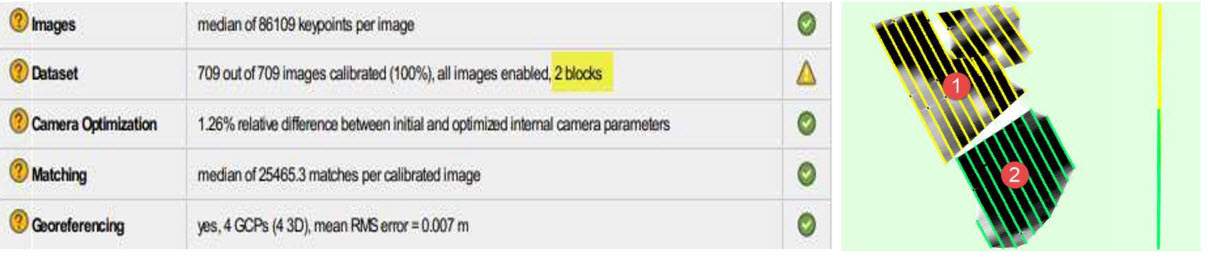
A block is a set of images that were calibrated together. Multiple blocks indicate that there were not enough matches between groups of images to provide global optimization. When a project contains multiple different blocks they may not be accurately georeferenced relative to each other. A project should ideally contain only 1 block. See below for how to check the number of blocks within the quality report.
Causes
There are several causes that can lead to this issue:
- The project consists of multiple flights which were flown at different periods, different heights, with different cameras.
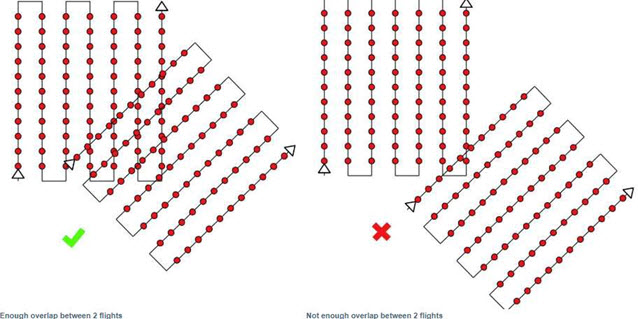
- There is not enough overlap between image acquisition plans.
- Corridor projects can exhibit this issue if images were not acquired correctly.
- The terrain is flat with homogeneous visual content such as agriculture fields or snow, sand, and water.
- The project area consists of forest and dense vegetation.
- Incorrect calibration method for the terrain and image dataset.
Solutions
Possible solutions to the previosly listed causes are proposed below.
For cause 1:
- The flight height should not be too different between the flights, as different height leads to different spatial resolution. For more information: Can PIX4Dmapper process Images taken at different Flight Heights?.
- Try to fly with the same lighting conditions, same hour of the day, same sun direction, same weather conditions.
For cause 2:
- Make sure that each plan captures the images with enough overlap.
For cause 3:
- Corridor mapping datasets should consist of at least 2 lines of flight with high overlap.
- It is also recommended to have image geolocation. It is highly recommended to have GCPs well distributed in the model: Number and distribution of ground control points (GCPs) in corridor mapping.
For cause 4:
- Process with lower Keypoints Image Scale: This processing option can lead to a higher number of calibrated images than the default original keypoint image scale. For more information: Menu Process> Processing Options... > 1. Initial Processing> General.
- Enable Geometrically Verified Matching.
For cause 5:
- Process with lower Keypoints Image Scale: This processing option can lead to a higher number of calibrated images than the default original keypoint image scale. For more information:
- Menu Process> Processing Options... > 1. Initial Processing> General.
For cause 6:
- Verify that the calibration method used for step 1 is appropriate for your project.
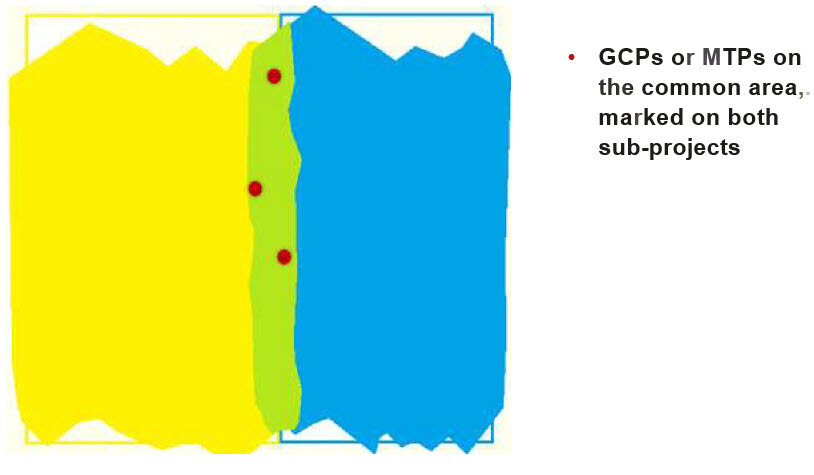
Tip: It is recommend adding common Manual Tie Points between the blocks in all the mentioned cases above. For more information:
How to add/ import and mark manual tie points (MTPs) in the rayCloud