Licenses: This article is valid for all PIX4Dcloud licenses.
Roles: Only Owners, Managers, and Editors can create, process, and share datasets in PIX4Dcloud.
Information: If a dataset does not fulfill the best practices or requires more than the capabilities explained below, the allowance or credits it consumed will not be returned.
IN THIS ARTICLE
Best practices
- Plan the mission and capture images according to the project area or object you want to reconstruct.
- Capture images with an appropriate ground sample distance.
- Capture images that are detailed, sharp, and contain enough contrast.
- Select the processing options that are appropriate for the dataset.
- (Optional) Improve the absolute accuracy by using GCPs or capturing images with an RTK drone.
Capabilities
- PIX4Dcloud can automatically detect GCPs when the following requirements are fulfilled.
- PIX4Dcloud offers a default set of optimized options for processing.
- PIX4Dcloud can generate and display reconstructions, but it cannot edit them.
- PIX4Dcloud can process datasets up to a certain size.
- PIX4Dcloud can display reconstructions up to a certain size.
- PIX4Dcloud uses default parameters for processing.
Best practices with PIX4Dcloud
Plan the mission and capture images according to the project area or object you want to reconstruct.
- PIX4Dcloud alone doesn't support the processing of rjpeg and grayscale thermal images. Note that the results may have scale problems.
- Only geolocated images are supported.
For all use cases, it is not recommended to capture over/under-exposed images since these images do not produce good results.
 |
 |
 |
| original image | strongly overexposed image | strongly underexposed image |
General case
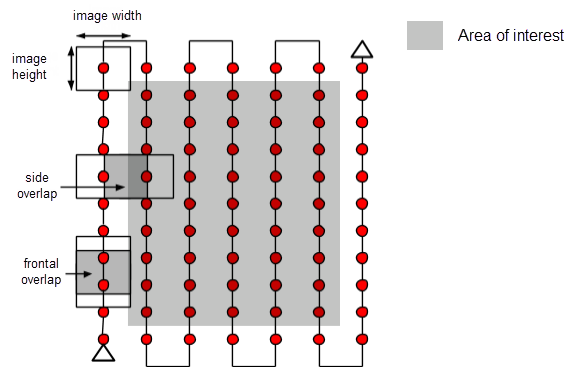
The recommended overlap for most cases is at least 75% frontal overlap (with respect to the flight direction) and at least 60% side overlap (between flying tracks). It is recommended to take the images with a regular grid pattern (Figure 1). The camera should be maintained as much as possible at a constant height over the terrain/object to ensure the desired GSD.
Forest and dense vegetation
Trees and dense vegetation often appear very differently between overlapping images due to their complex geometry (thousands of branches and leaves). Therefore, extracting common characteristic points (keypoints) between the images is more difficult. To achieve good results, it is recommended to use a grid image acquisition plan like the one described in the General Case section by applying the following changes:
- Increase the overlap between images to at least 85% frontal and side overlap.
- Increase the flight height: At higher altitudes, there is less perspective distortion (therefore causing fewer appearance problems), and the dense vegetation has better visual properties. In other words, detecting visual similarities between overlapping images in such areas is easier. The flight height, image pixel resolution, and focal length determine the images' ground sampling distance (spatial resolution). Best results are obtained with a GSD higher than 10cm/pixel.
Flat terrain with agricultural fields
In cases where the terrain is flat with homogeneous visual content, such as agriculture fields, it isn't easy to extract common characteristic points (keypoints) between the images. To achieve good results, it is recommended to use a grid image acquisition plan like the one described in the General Case section by applying the following changes:
- Increase the overlap between images to at least 80% frontal and side overlap.
- Fly higher. In most cases, flying higher improves the results.
Building reconstruction
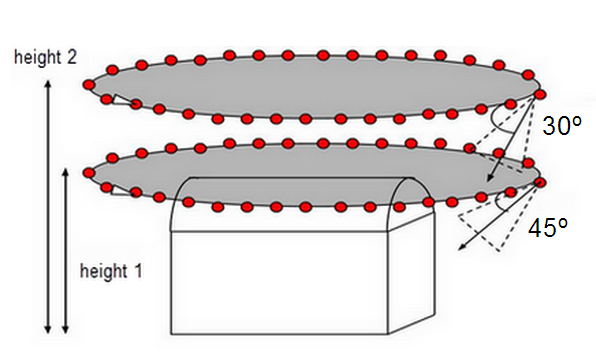
Reconstructing 3D buildings requires a specific image acquisition plan (Figure 2):
- Orient the pitch of your camera so that the majority of the image is filled with the object you want to reconstruct, and objects you do not want to reconstruct comprise the minority of the image. No single camera pitch angle can be applied to all missions.
- Fly a second and third time around the building, increasing the flight height and decreasing the camera angle with each round.
- It is recommended to take one image every 5-10 degrees to ensure enough overlap, depending on the size of the object and its distance to it.
- The flight height should be increased at most twice between the flights, as different heights lead to different spatial resolutions.
- PIX4Dcloud generates a high-quality point cloud for oblique images of buildings.
Special cases
This section presents some hints for terrain that is difficult to map, such as terrains with snow, sand, lakes, etc.
Snow and sand have little visual content due to large, uniform areas. Therefore:
- Use a high overlap: At least 85% frontal overlap and at least 70% side overlap.
- Set the exposure settings accordingly to get as much contrast as possible in each image.
Water surfaces have almost no visual content due to large, uniform areas. Sun reflection on the water and waves cannot be used for visual matching.
- Oceans are impossible to reconstruct.
- Each image must include land or some other stationary object to reconstruct other water surfaces, such as rivers or lakes. Flying higher may help to capture more land features.
Corridor mapping
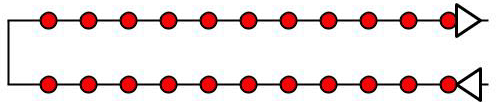
Mapping a corridor such as a railway, road, or river requires at least two flight lines (Figure 3). GCPs are not required but are recommended to improve the accuracy of the reconstruction. For more information about the number and distribution of GCPs in corridor mapping: Number and distribution of ground control points (GCPs) in corridor mapping.
For a dual track, it is recommended to use at least 85% frontal overlap and at least 60% side overlap.
It is possible to use nadir images or oblique images. For flat terrain, it is recommended to use nadir images.
If a dual-track image acquisition plan is not possible, a single-track image acquisition plan can be used if (Figure 4):
- Overlap is high enough: At least 85% frontal overlap.
- Ground control points (GCPs) are defined along the flight line in a zigzag pattern.

Large Vertical Object reconstruction
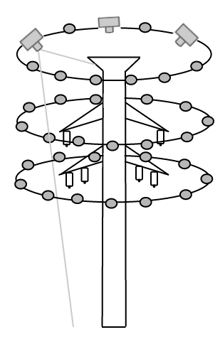
The 3D reconstruction of objects that are tall and slender requires a specific image acquisition plan (Figure 8):
- Fly close to the structure.
- Fly several times around the structure at several heights.
- Images should be taken with high overlap: 90% overlap between images taken at the same height and 60% overlap between images taken at different heights.
- Everything in the image frame must be in focus, including objects in the background that are outside the project area.
- Having image geolocation is recommended.
Power Tower
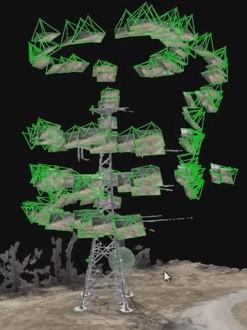
Power Tower reconstructed in the rayCloud
Capture images with an appropriate ground sample distance.
This article explains what the Ground Sampling Distance (GSD) is and how to calculate it.
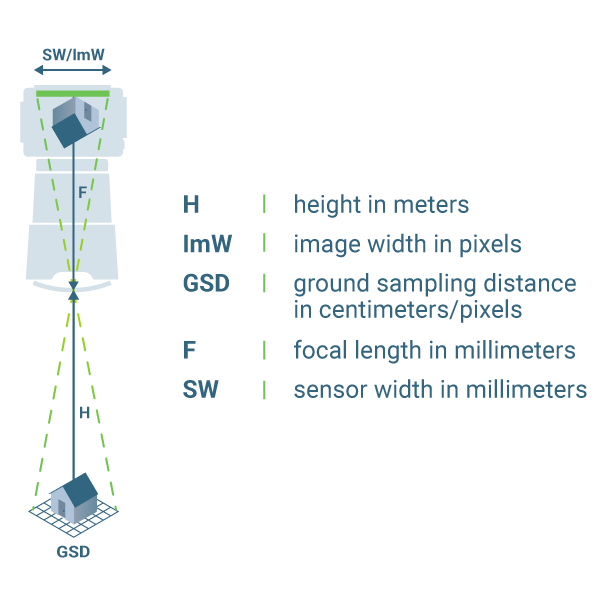
The Ground Sampling Distance (GSD) is the distance between two consecutive pixel centers measured on the ground. The bigger the value of the image GSD, the lower the spatial resolution of the image and the less visible details.
The GSD is calculated based on:
- The flight height / the distance from the terrain or object (H).
- The camera specifications:
- Image width (ImW).
- Sensor width (SW).
- Focal length (F)
- Automatic tool for GSD calculation: TOOLS - GSD calculator.
- How to select camera focal length and flight altitude considering the desired Ground Sampling Distance and terrain to map: How to select Camera Focal Length and Flight Altitude considering the desired Ground Sampling Distance and Terrain to map?.
- Can images taken at different flight heights be processed?: How to process images taken at different Flight Heights / GSD? .
It is important to decide on the GSD value before starting the image acquisition in order to adjust the flight height and the camera specifications to the project requirements. For example, when a detailed reconstruction of the area is needed, we recommend flying closer (low GSD) to the object of interest. On the other hand, when covering large areas that do not need very detailed results, flying higher (high GSD) can greatly reduce the acquisition time and batteries needed as well as to reduce the processing time.
- A GSD of 5 cm means that one pixel in the image represents linearly 5 cm on the ground (5*5 = 25 square centimeters).
- A GSD of 30 cm means that one pixel in the image represents linearly 30 cm on the ground (30*30 = 900 square centimeters)


Capture images that are detailed, sharp, and contain enough contrast.
Consider the following aspects to capture images that are detailed, sharp, and contain enough contrast.
Camera Settings
The shutter speed, aperture, and ISO should be set on automatic. If images are blurry or noisy, it is recommended to manually set these parameters.
There is a tradeoff between the shutter speed, the aperture, and the ISO sensitivity. For processing, the images should be sharp and have the least amount of noise. Such images can be obtained when the scene is well illuminated (scattered clouds should be avoided), and the camera parameters are well adjusted. If the scene is not sufficiently illuminated, images will be noisier and less sharp, thus lowering the accuracy of the results.
- As a rule of thumb, the shutter speed should be fixed, the ISO needs to be set at a low value that does not produce noisy images, and the aperture should be set to automatic to adjust for varying levels of brightness in the scene. If the tradeoff is not correct, overexposed or underexposed images may be obtained.
The shutter speed should be fixed and set to a medium speed (as an indication: between 1/300 second and 1/800 second), but fast enough to not produce blurry images. If more than 5% of the images are subject to a directional blur, it is a good indication that the shutter speed should be slightly increased.
The ISO should be set as low as possible (minimum 100). High ISO settings generally introduce noise into images and drastically reduce the quality of the results.
The aperture minimum and maximum values depend on the lens. High aperture is translated into low numbers, for example, f2.7 (which will capture a lot of light). If both the shutter speed and ISO are adjusted, it is better to leave the aperture (f) on automatic. - The electronic and mechanical stabilization should be disabled as it interferes with PIX4D desktop software's algorithms.
- The recommended focus mode is Manual Focus on Infinity. This mode of focusing should always give focused images for aerial projects. For terrestrial projects, this mode will probably lead to out of focus results, if a long focal length is used.
Problems with images due to wrong camera parameters or inadequate equipment that interfere with the processing:





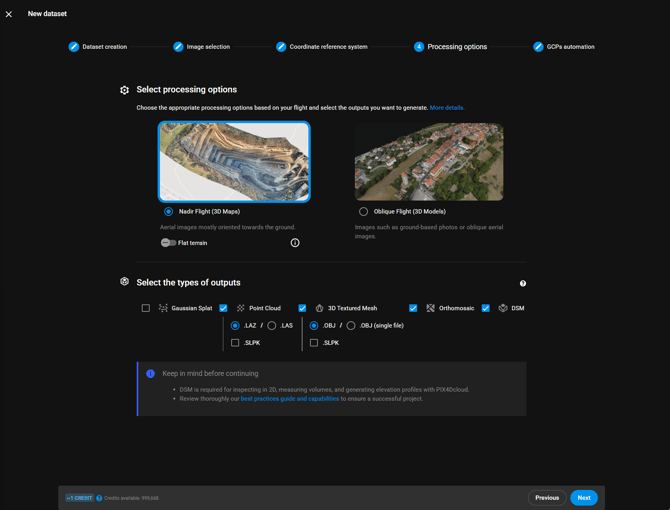
Select the processing options that are appropriate for the dataset.
PIX4Dcloud offers different processing options depending on the type of flight that the user would like to process. The recommended options are listed below:
| Type of flight and dataset | Recommended processing options |
| Nadir RGB images | Nadir Flight (3D maps) |
| Oblique RGB images | Oblique Flight (3D models) |
| Terrestrial RGB images(****) | Upload from PIX4Dcatch |
| 360 images | Not supported |
| Multispectral images (*) | Not supported |
|
RGB images of agricultural fields
|
Nadir Flight (3D maps) with flat terrain |
| Thermal images (**) | Not supported |
| Fisheye camera lens (***) | Not fully supported |
(*) Multispectral images are not supported. Processing in PIX4Dmapper or PIX4Dfields is recommended.
(**) Thermal RJPG images are not supported. Only thermal JPG grayscale images are supported but this is not recommended as the results may exhibit radiometric errors, scale problems, and calibration inaccuracies.
(***) It is possible to process Fisheye camera lenses, but they are not compatible with Gaussian splat processing and the virtual inspector tool.
(****) Processing datasets composed of aerial and terrestrial images (mixed datasets) is not officially supported. In these cases, it is recommended to process the terrestrial images as separate datasets and the aerial images as separate datasets.
- Selecting the wrong processing option for your flight may lead to bad results.
- Panorama 360 images are not supported for processing in PIX4Dcloud.
- It is not recommended to process datasets captured with DJI Smart Oblique enabled. It is recommended to use the following mission types instead to ensure successful processing with PIX4Dcloud:
- Traditional nadir single grid
- Double grid with oblique images
- Orbit, circular, or helix
For more information, see New dataset > Processing options - PIX4Dcloud.
(Optional) Improve the absolute accuracy by using GCPs or capturing images with an RTK drone.
The expected absolute accuracy of the final results (orthomosaic, DSM, point cloud, and DSM) when using PIX4Dcloud depends on the following:
Accuracy of the geolocation of the images
*ppm: parts per million ( 1mm per km)
- Accuracy in X,Y → 1 cm + 2 * (5 mm) = 1.1 cm
- Accuracy in Z → 2 cm + 2 * (5 mm) = 2.2 cm
For more information, Flying camera to surveying tool: RTK/PPK drone upgrades.
Use of GCPs
If ground control points (GCPs) are used, the absolute accuracy of the results will be comparable to the absolute accuracy of the GCPs, even with a standard drone. For example, if the accuracy of the GCPs is about 2-3 cm, we can expect that same degree of absolute accuracy in our final results.
More information: RTK vs PPK drones vs GCPs: which provides better results?
PIX4Dcloud Pro license includes the AutoGCP feature, which allows the use of GCPs to improve accuracy. Please see the requirements for this feature.
Capabilities of PIX4Dcloud
PIX4Dcloud can automatically detect GCPs when the following requirements are fulfilled.
Image and GCP requirements
For the AutoGCPs detection algorithm to succeed, the following requirements regarding the images and the GCPs must be met. Additional information and best practices are available in Automatic detection of targets - AutoGCP algorithm.
Image requirements
- Image quality has to be good (blurry or low-contrast images make the algorithm fail).
- Images have to be geolocated in WGS84 (EPSG:4326).
- Images' geolocation accuracy has to be equal to or better than 5 meters horizontally and 10 meters vertically.
- Images have to be taken at nadir or slightly oblique angles.
GCP requirements
- Squared, diagonal, and Aeropoints targets are supported.
- The recommended size is a minimum of 20 times the average GSD of the project.
Example: If the average GSD of the projects is 2.5 cm (1 inch), the recommended target size is 50 cm (20 inches).
- Black and white targets are supported. Other colors may work in some circumstances.
- GCPs must be placed at a distance of at least 10 m from each other.
- GCPs must have a projected coordinate system.

PIX4Dcloud offers a default set of optimized options for processing.
- Nadir Flight (3D maps): It is ideal for aerial RGB images acquired using a grid flight plan with high overlap, mostly oriented towards the ground. Typical applications are quarries, cadasters, etc.
- Oblique Flight (3D models): Ideal for any RGB images with a high amount of overlap, such as oblique aerial images (free flight). Application examples are 3D models of buildings, objects, inspection, etc.
- Sometimes, the default parameters may produce wrong results even if the flight is correct and the images are of sufficient quality.
- If the processing options must be changed, other software packages like PIX4Dmatic can be used instead
PIX4Dcloud can generate and display reconstructions, but it cannot edit them.
PIX4Dcloud is a web-based software enabling the visualization of various outputs, including Orthophotos, Digital Surface Models, NDVI indexes, Point Clouds, and 3D meshes. It's important to note that these results cannot be edited within PIX4Dcloud.
We recommend using alternative products such as PIX4Dmatic, or PIX4Dsurvey for any necessary editing.
PIX4Dcloud can process datasets up to a certain size.
PIX4Dcloud can successfully process a certain number of images according to the characteristics of the project, the processing options, and the requested outputs.
- Although PIX4Dcloud supports up to 4000 images, it does not mean that they can be handled in all cases. Depending on image size, overlap, shape of the project and outputs to be generated, the process may fail even with less than 4000 images. This is particularly true when using large format cameras (42 MP or more) or projects with a lot of overlap (oblique flights). More information in this article.
- PIX4Dcloud supports uploading images within 12 hours.
PIX4Dcloud can display reconstructions up to a certain size.
A dataset can consist of uploaded results only. In this case, no images are processed but the uploaded files are processed for their web-visualization and optimization.
The photogrammetric files that can be uploaded and displayed as results are the following:
- Orthomosaic (.GeoTIFF),
- DSM (.GeoTIFF),
- Index (.GeoTIFF): NDVI map or other index maps
- Point Cloud (.las, .laz),
- 3D Textured Mesh (.obj).
There are some limits in terms of file size and formats for file uploads:
- Orthomosaic: one single GeoTIFF file supported, 50 GB maximum
- DSM: one single GeoTIFF file supported, 50 GB maximum
- Index: one single GeoTIFF file supported, 50 GB maximum
- Point Cloud: one single LAS or LAZ file supported.
- 3D Textured Mesh: one single OBJ+MTL+JPG set of files supported
- OBJ: Maximum 1 GB.
- JPG: Maximum 16k x 16k.
PIX4Dcloud uses default parameters for processing.
PIX4Dcloud is a user-friendly web-based software designed for simplicity, eliminating the need for expertise in photogrammetry. It uses a set of default parameters tailored for various flight scenarios. These parameters are not adjustable.