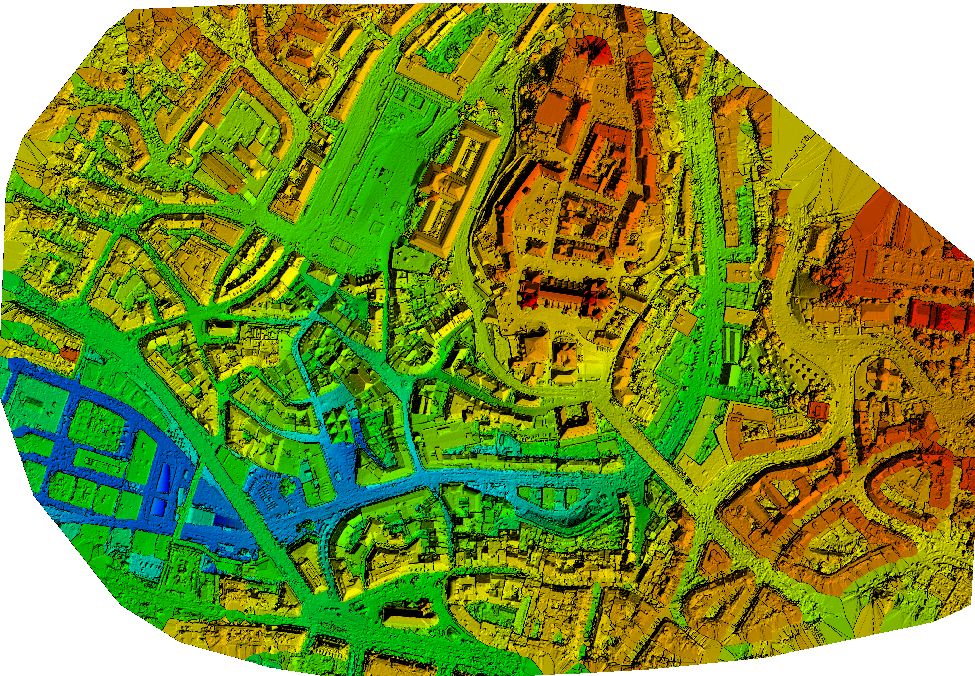
高密度点群とは?
高密度点群とは、モデルを再構築する 3D ポイントの集合です。高密度点群の各ポイントについて、X、Y、Z の位置情報と色情報が保存されます。
高密度点群は、ステップ「1. 初期処理」の自動タイ ポイント (ATP) に基づいて計算され、距離、面積、体積の測定に役立つ非常に正確な背景情報を提供します。

3D テクスチャー メッシュとは?
3D テクスチャー メッシュはモデルの形状を表し、頂点、辺、面に加え、モデル上に投影された画像のテクスチャーで構成されます。
オンライン プラットフォームでのモデルの提示、視覚化、アップロードおよび共有に便利です。正確さよりも見栄えを重視しているため、測定目的での使用は推奨されません。

オルソモザイクとは?
オルソモザイクは 2D マップです。各ポイントに X、Y の位置情報と色の情報が含まれています。オルソモザイクは一定のスケールを持ち、2D の測定 (距離、サーフェス) に使用できます。また、入力画像の次のような問題点を補正します。
- カメラの視点
- カメラからオブジェクト/地面の各ポイントまでの距離に基づくスケールの差異
オルソモザイクの生成は画像のスティッチングとは異なります。詳細については、「画像スティッチングとオルソモザイクの違い - PIX4Dmapper (英語)」をご覧ください。

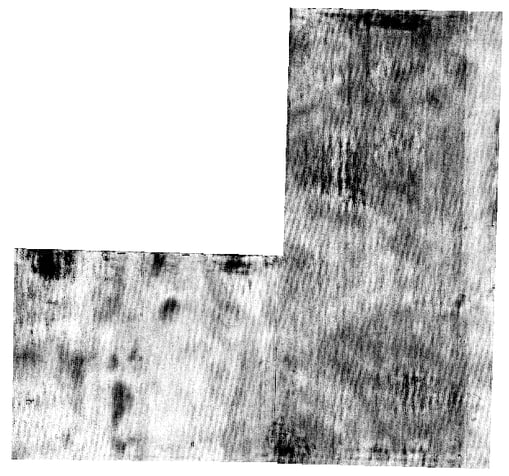
反射率マップとは?
反射率マップは主に、入力がマルチスペクトル/熱画像である場合に使用します。反射率マップとオルソモザイクの詳細については、「反射率マップとオルソモザイクの違い (英語)」をご覧ください。
各バンドに対して 1 つの反射率マップが生成されます。これは、画像内のピクセル値に基づいて特定の地物の反射率を適切に評価することを目的としています。このピクセル値は、例として以下のような多くの要因の影響を受けます。
- 入射光
- ISO
- 絞り
- シャッター スピード
- センサー応答と光学システム
- 口径食
そのため PIX4Dmapper は、カメラの位置と再構築されたモデルを使用し、これらのさまざまな要因を考慮しながら、正確な反射率マップを作成します。また、実態を反映した結果を得るには、適切な機器を用いることが重要です。カメラの要件に関する Pix4D の推奨事項については「精密農業用のカメラの要件 (英語)」をご覧ください。
注: 反射率マップを生成できるのは PIX4Dmapper と PIX4Dfields のみです。
注: 正確な反射率マップを作成するために、キャリブレーション ターゲットを使用してマルチスペクトル画像を放射量キャリブレーション・補正できます。詳細については、「放射量キャリブレーション ターゲット (英語)」と「放射量補正」をご覧ください。

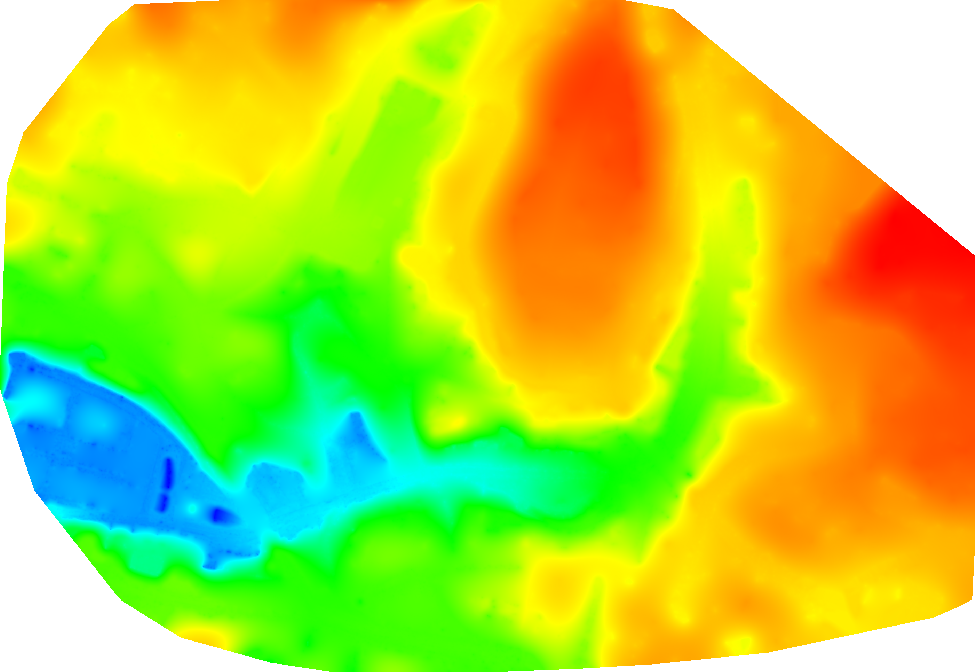
DSM とは?
数値表層モデル (DSM) は、マッピングされたエリアの 2.5 次元モデルです。DSM は次の2種類のファイルとしてエクスポートできます。
- ラスター GeoTIFF
- 点群 (.xyz、.las、.laz)
ラスター Geotiff ファイルの各ピクセルと点群の各ポイントには (X、Y、Z) の位置情報が含まれています。ただし、色情報は含まれていません。

DSM には、それぞれの (X、Y) の位置に対して 1 つの Z 値 (この (X、Y) 位置におけるもっとも高い地点の高度) のみを含みます。これが、DSM が 2.5 次元モデルとみなされている理由です。


DTM とは?
数値地形モデル (DTM) は、マッピングしたエリアの 2.5 次元モデルから建物などのオブジェクトを取り除いたものです。DTM は GeoTIFF ラスター ファイル形式でエクスポートできます。
ラスター ファイルの各ピクセルには (X、Y、Z) の位置情報が含まれていますが、色情報は含まれていません。
指数マップとは?
PIX4Dmapper と PIX4Dfields は NDVI などの主要な指数やカスタム指数を生成できます。
各指数は指数マップに関連付けられています。このマップ上の各ピクセルの値は、関連付けられている反射率マップから導き出せれます。
- 赤色反射率マップのピクセル値: 0.4
- 近赤外反射率マップのピクセル値: 0.6
- 緑色反射率マップのピクセル値: 0.1
ガウシアン スプラット モデルとは?
ガウシアン スプラッティングとは、シーンの極めて写実的な 3D 出力を生成することで、点群や 3D テクスチャー メッシュなどの 3D 出力の視覚的な品質を向上させる技術です。
この手法では、シーンはガウシアンと呼ばれる数百万もの粒子で表現され、各粒子は位置、向き、スケール、透過度および色などの属性によって定義されます。
この処理は、画像をキャリブレーションし最初の点群を生成する従来のフォトグラメトリ ワークフローから開始します。次に、この点群の各点がガウシアンに変換されることにより、最終的に従来のフォトグラメトリ手法よりも高精度でより視覚効果の優れた点群と 3D テクスチャー メッシュが生成されます。
詳細については「PIX4Dcatch を使用してガウシアン スプラット モデルを生成する」をご覧ください。