Pix4Dmapperは 画像処理ソフトウェアで、画像間の数千個もの共通点を自動検出します。画像から検出された1つ1つの特徴的な点は キーポイントと呼ばれます。 2枚の 異なる画像の 2つの キーポイントが同じであることが検出された場合、それらは マッチするキーポイントとなります。正確に マッチしたキーポイントの各グループは、1つの3Dポイントを生成します。2つの画像間に高度なオーバーラップがある場合、キャプチャされた共通エリアはより大きく、より多くのキーポイントをマッチングすること ができます。キーポイントの数が多くなればなるほど、3Dポイントをより正確に計算することができます。したがって、画像間に高度なオーバーラップを維持することが需要です。
画像取得プランは結果の質に大きな影響をおよぼすため、慎重に構築することが重要です。
万が一 高速/低解像度 処理が良い結果をもたらさない場合、おそらく データセットが不十分であるため、再び画像を取得する可能性があります。 場合によっては 高速/低解像度オプションが機能しないこともあり、 完全 処理 がモデルを正しく再現します。
高速/低解像度 と 完全処理の違いに関する詳しい情報はこちらの記事(英語)をご覧ください: Full Processing vs Rapid / Low Resolution(完全処理と高速/低解像度処理)
理想的な画像取得プラン
理想的な画像取得プランは、再現する地形/オブジェクトのタイプによって異なります。:
- 一般的なケース: 森林、雪、湖、農地、その他の再現が困難な地形を含まないプロジェクト。
- 森林 および密生した植生:森林や密生した植生で覆われた地域のプロジェクト向け。
- 農地のある平坦な地形: 農地などの均質な視覚的コンテンツのある平坦な地形向け。
- 建造物形状の再現:建造物の3Dモデリング向け。
- 特殊なケース:雪、砂、水面(海洋、湖、河川など)向け。
- コリドーマッピング:線形の 関心エリア(道路、河川など)のあるプロジェクト向け。
- 複数飛行:複数の飛行で撮影された画像のあるプロジェクト向け。
- 都市の再現(立面可視化):都市部の3Dモデリング向け。
- 3Dインテリア再現:建物内部の 3Dモデリング 向け。
- 複合再現: 混合データセット(内部/外部および/または空撮/地上撮影および/または鉛直/オブリーク)向け。
- 大型の垂直オブジェクトの再現:送電塔や風力タービンなどのオブジェクトの3Dモデリング向け。
- トンネルの再現:トンネルの3Dモデリング 向け。
- サーマル: サーマル(赤外線)カメラで取得されたデータセット。
- 小さなオブジェクト(英):小さなオブジェクトの3Dモデリング向け。
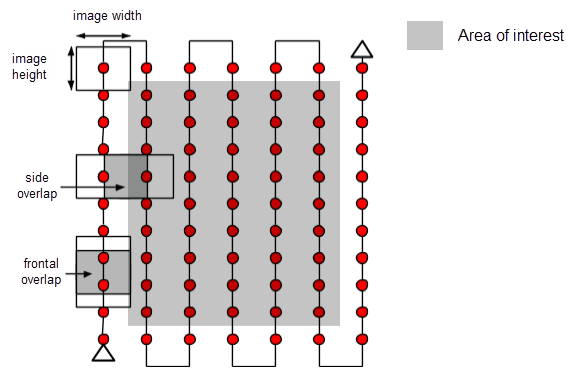
一般的なケース
ほとんどの場合、推奨されるオーバーラップは少なくとも75%の前面オーバーラップ(飛行方向に関して)と少なくとも60%の側面オーバーラップ(飛行トラック間)です。標準的なグリッドパターンで画像を撮影することをお勧めします(図1)。希望するGSDを確実にするには、カメラを地形/オブジェクト上の一定の高度に可能な限り維持する必要があります。
森林と 密生 した植生
木や密生した植生は、複雑な形状(数千もの枝と葉)のため、オーバーラップのある画像の間で非常に異なる外観を持つことが多くあります。したがって、画像間で共通の特徴点(キーポイント)を抽出することが困難です。良好な結果を得るには、次の変更を適用して、一般的なケース セクションに説明されているグリッド画像取得プランを使用することを推奨します:
- 画像間のオーバーラップを 少なくとも85%のオーバーラップ率とサイドオーバーラップ率に上げてください。
- 飛行高度を高める:高度がより高くなると、射影ひずみが少なくなり(したがって外観の問題が減少)、密生した植生の視覚的特性の質が高くなります。言い換えると、そのようなエリアでのオーバーラップをもつ画像間の視覚的類似性を検出することが容易になります。画像ピクセル解像度と焦点距離と組み合わせた飛行高度は、画像の地上サンプリング距離/地上解像度(空間解像度)を決定します 。10cm/ピクセルを超えるGSDで最良の結果が得られます。
正しい処理オプションを選択して密生した植生地域の結果を 改善する方法についての詳しい情報はこちらの記事(英語)をご覧ください: How to improve the outputs of dense vegetation areas using PIX4Dmapper?(密生した植生地域のアウトプットを改善する方法)
農地のある平坦な地形
地形が農地などの均質な視覚的コンテンツで平坦な場合、画像間の共通の特徴点(キーポイント)を抽出することは困難です。良好な結果を達成するためには、次の変更を適用して、 一般的なケース セクションに説明されているグリッド画像取得プランを使用することを推奨します:
- 画像間のオーバーラップを 少なくとも 80%のオーバーラップ率とサイドオーバーラップ率に上げてください。
- より高い高度で飛行させます。ほとんどの場合、より高く飛行させることで 結果が改善されます。
- 正確な 画像のジオロケーションを用意し 、農業テンプレートを使用してください。 農業 (Ag) テンプレートに関する詳しい情報はこちらの記事(英語)をご覧ください:Processing Options Default Templates(処理オプションのデフォルトテンプレート)
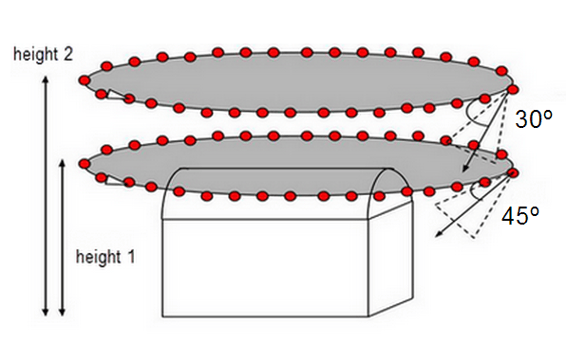
建造物の再現
3Dで建造物を再現するには、特定の画像取得プランが必要です(図2):
- 最初は45度のカメラアングルで 建物周りを飛行します。
- さらに2回目と3回目を飛ばし、 飛行 高度 を上げ各回で カメラアングルを下げていきます。
- オブジェクトのサイズと距離に応じて、十分なオーバーラップを確保するために、5~10度ごとに 1つの画像を撮影することをお勧めします。より短い距離とより大きなオブジェクトには、より小さい角度ごとの画像が必要となります。
- 高度が異なると空間分解能も変わるため、飛行間で2倍を超える飛行高度の増加はお勧めできません。さらに詳しい 情報はこちらの記事(英語)をご覧ください: How to process images taken at different Flight Heights / GSD?(Pix4Dmapperは異なる飛行高度で撮影された画像を処理できますか?)
- Pix4Dmapperは建造物のオブリーク画像のための高品質な ポイントクラウド(点群)を生成します。しかし選択したテンプレートが3Dモデルの場合、オルソモザイクは生成されません: Processing Options Default Templates(処理オプションのデフォルトテンプレート)
画像は、各データセットおよびデータセット間に十分なオーバーラップを有する必要があります。このような場合は、GCPまたはマニュアルタイポイントを使用して、異なるセットの画像を適切に調整することを強くお勧めします。
特殊ケース
このセクションでは、雪、砂、湖などのマッピングが難しい地形についていくつかお役立ち情報を示しています。
均一なエリアが大きいため、雪や砂には視覚的コンテンツがごくわずかしかありません。したがって:
- 高いオーバーラップを 使用します:少なくとも 85% の前面オーバーラップと少なくとも70%の 側面オーバーラップ。
- それぞれの画像にできるだけ多くの コントラスト を取得できるように露出設定を調節します。
水面は 均一なエリアが大きいため、視覚的コンテンツはほとんどありません。水面と波の日光反射は、視覚マッチングには使用できません。
- 海洋 は再現するのが不可能です。
- 河川 や 湖などの他の水面を再現するには、各画像に地形部分が必要となります。より高く飛行すると、より多くの地形を含むことができます。
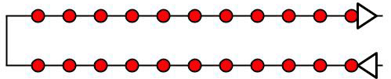
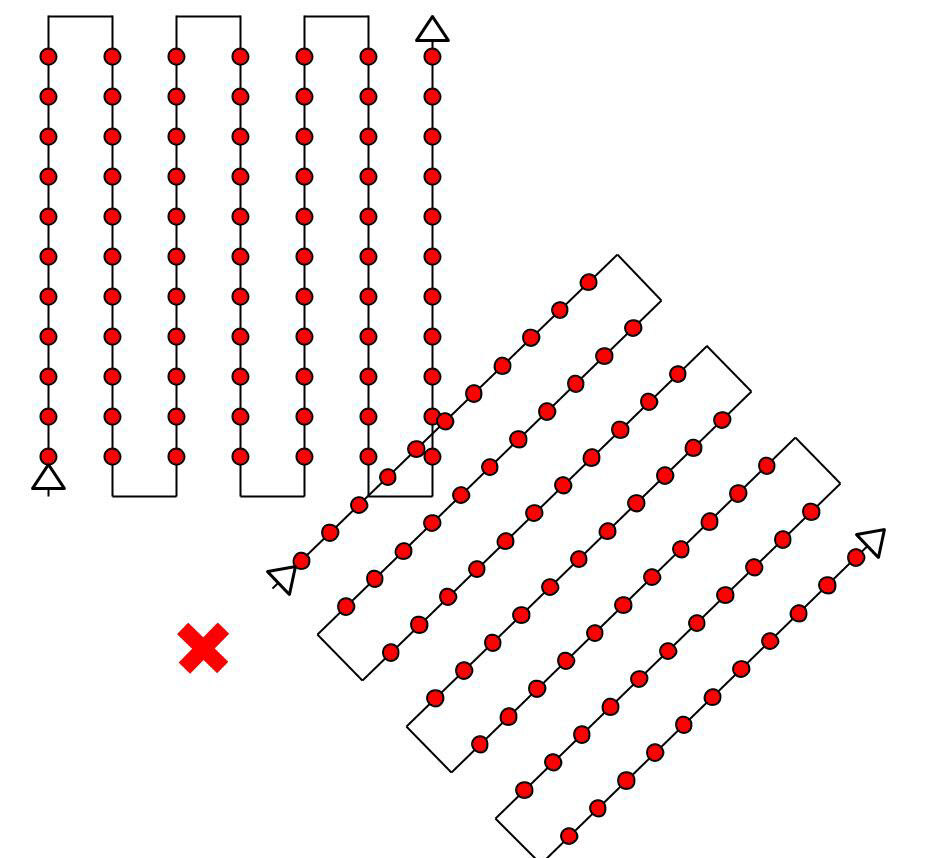
コリドーマッピング
鉄道、道路や河川などの回廊のマッピングには、少なくとも2つの 飛行ラインが必要です(図3)。 GCPは 必要ありませんが、再現のジオリファレンスと精度を向上させるために 推奨 されます。 コリドーマッピングにおけるGCPの数と分布に関する詳しい情報はこちらの記事(英語)をご覧ください: Number and distribution of ground control points (GCPs) in corridor mapping(コリドーマッピングにおけるグラウンドコントロールポイント(GCP)の数と分布)。
デュアルトラックでは、前面のオーバーラップが少なくとも85%、側面のオーバーラップが少なくとも60%であることを推奨します。
鉛直画像またはオブリーク画像を使用することができます(両トラック間の回廊中央方向で角度0o(天底)~45o)。平坦な地形では鉛直撮影画像を使用することを推奨します。
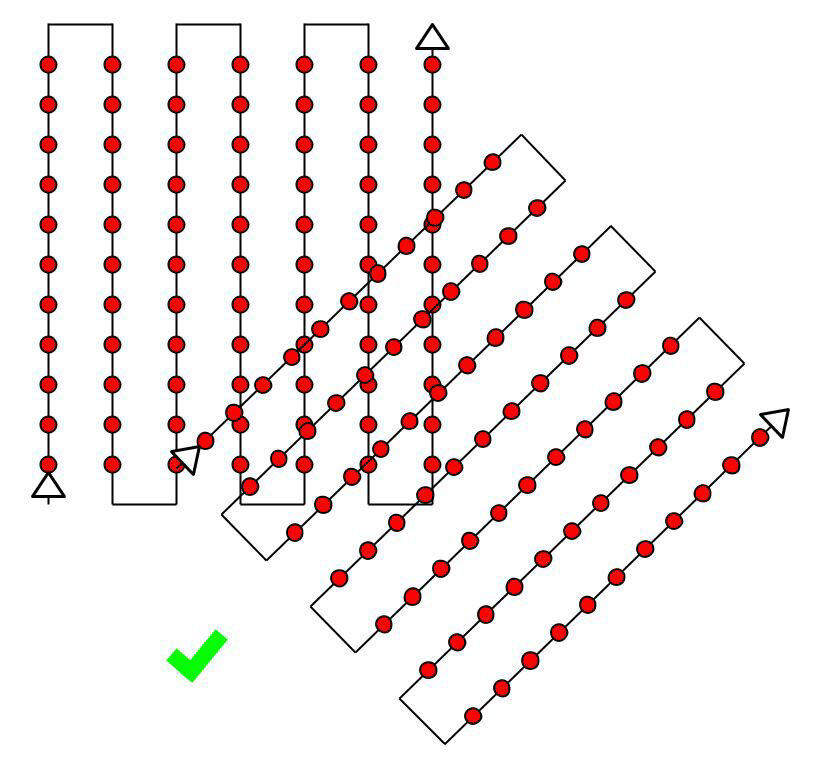
デュアルトラック画像取得プランが不可能な場合、次のようなケースにはシングルトラック画像取得プランを使用することができます(図4 ):
- オーバーラップが十分に高い:少なくとも 85%の 前面オーバーラップ。
- グラウンドコントロールポイント(GCP)が飛行ラインに沿ってジグザグに設定されている。
複数飛行
Pix 4Dmapperは、複数の飛行から撮影された画像を処理することができます。異なる画像取得プランを構築する際は、次の事項を確認してください:
- 各プランが十分なオーバーラップをもつ画像をキャプチャすること。
- 2つの 画像取得プランの間に十分なオーバーラップがあること(図5)。
- できるだけ同じ条件下(太陽の方向、気象条件、新しい建造物がないなど)で異なるプランが実行されること。
複数の飛行から取得したデータセットを処理するための特別な方法があります 。ステップごとの手順は次のとおりです:Processing Large Datasets(大きなデータセットの処理)
都市の再現(立面の可視化)
都市部の3D再現には、建物のすべての立面(北側、西側、南側、東側)が画像上に表示されるように、ダブルグリッド画像取得プランが必要になります。 オーバーラップは 一般的なケースと同様である必要があります。
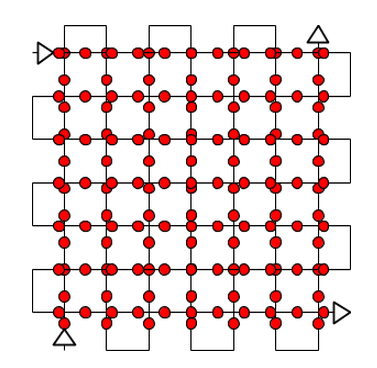
立面が見えるようにするには、画像を10oから35o(0o - カメラは下方を向く)の角度で撮影する必要があります。より多くの詳細が必要な場合は、空撮画像と地上撮影画像を組み合わせる必要があります。
画像は、各データセットおよびデータセット間に十分なオーバーラップを有する必要があります。このような場合は、GCPまたはマニュアルタイポイントを使用して、異なるセットの画像を適切に調整することを強くお勧めします。
3Dインテリア再現
内部の再現には、地上撮影画像を使用することを強く推奨します。高いオーバーラップが必要です( 90% )。したがって、魚眼レンズカメラの使用を推奨します。
マニュアルタイポイントは再現を改善し、モデルを適切に調整するのに役立ちます。さらに詳しい情報はこちらのウェビナー(英語)をご覧ください: Indoor Mapping Webinar
複合再現
内部/外部および/または空撮/地上撮影および/または鉛直/オブリーク画像を組み合わせることができます。あらゆる組み合わせが可能です。
画像は、各データセットおよびデータセット間に十分なオーバーラップを有する必要があります。このような場合は、GCPまたはマニュアルタイポイントを使用して、異なるセットの画像を適切に調整することを強くお勧めします。さらに詳しい情報はこちらのウェビナー(英語)をご覧ください: Merging Terrestrial and Aerial (Oblique and Nadir) Images in One Project
大きな垂直オブジェクトの再現
送電塔、風力タービンなどの物オブジェクトの3D再現 には、特定の画像取得プランが必要です(図8):
- 飛行は構造の近くを飛行します。
- 異なる高度で構造周囲を数回回ります。
- 画像は高いオーバーラップで撮影する必要があります:同じ高度で撮影された画像間で90%のオーバーラップと異なる高度で撮影された画像間で60%のオーバーラップ。
- トップサークルの最適なカメラアングルは45度です。地面に向けることで、画像の内容をより簡単にマッチングすることができ、 より良い結果を取得できます。
- 画像は できるだけ焦点を合わせる必要があります(主要オブジェクトと背景の両方に焦点を合わせる必要があります)。
- 画像のジオロケーションを持つこと が推奨されています。

送電塔
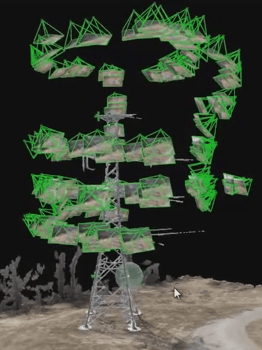
rayCloudで再現された送電塔
トンネルの再現
Pix4Dmapperはトンネルを再現することができます。トンネル再現にとって最大の課題 は照明条件です。自然光(トンネルが長すぎない)または人工光で照明条件が良好な 場合、高い質で再現 できることもあります。
非常に暗いトンネルの場合は、三脚の使用を推奨します。
- 魚眼レンズカメラの使用。
- 複数のラインで 画像を撮影(シングルトラック撮影を避ける)。 複数 のトラック画像取得プランが不可能な場合、シングルトラックを使用することができます。この場合、GCPを強くお勧めします。

図9.トンネルの自動タイポイント。
サーマル
サーマル(赤外線)のプロジェクトにおいて品質の良い再構築を実現するためには、画像の取得の際にいくつかの推奨点にお気を付けください:
- とても高いオーバーラップ率: 90% 進行方向および コース間 の画像オーバーラップ率。
- 画像は少なくとも640x480の 解像度で撮影されていること。
- 画像に動きによるブレがないこと。飛行速度が速いと画像にブレが出る原因になりかねます。