The Terrain filter process classifies selected input point clouds into terrain and non-terrain based on the selected processing values. These classes can then be used in future processing steps, for example, to create a grid of points only from the terrain class.

Access:
- Click Process
 or,
or, - On the Menu bar, click Process > Terrain filter or,
- On the Content panel, click Terrain classes >
 .
.
IN THIS ARTICLE
Input point cloud
Sample distance
Rigidity
Above ground threshold
Processing options
Input point cloud
Defines the point clouds used for the Terrain filter process:
- All - default: All point clouds in the Content > Point clouds are used for processing.
- Only visible. Only visible point clouds in the Content > Point clouds are used for processing.
Example: When the Only visible option is selected, only the visible point cloud [ 1] is used for processing. Point clouds with visibility off (  ) are not used for processing.
) are not used for processing.

Sample distance
- Sample distance [units]: Determines a sampling grid size for the algorithm. The range depends on the units of the project coordinate system:
- 5.0 m - 0.5 m, 1.0 m - default.
- 15.0 ft - 1.5 ft, 3.0 ft - default.
Example: Setting the correct value for the Sample distance parameters highly depends on the characteristics of the input point cloud:
- Large sample distance: For simple and flat areas or sparse point clouds.
- Small sample distance: For areas with a lot of rapid elevation changes in the terrain and for areas with buildings. Using a smaller sample distance allows detecting more details in the terrain.
Note: The Sample distance parameter has a direct impact on the processing time. Smaller values, e.g. 0.5 m or 1.5 ft, can increase the processing time.
Rigidity
- Rigidity (Low - default, Middle, High): A physical parameter of a fabric that simulates the terrain. Low rigidity is soft and drapes more easily, high rigidity is stiffer and flexes less when draped.
Above ground threshold
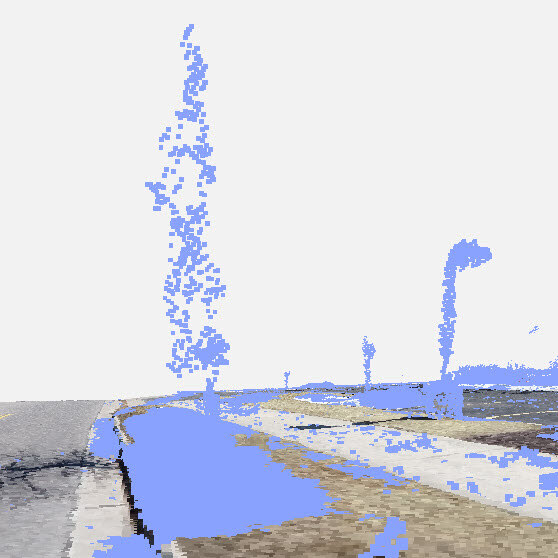
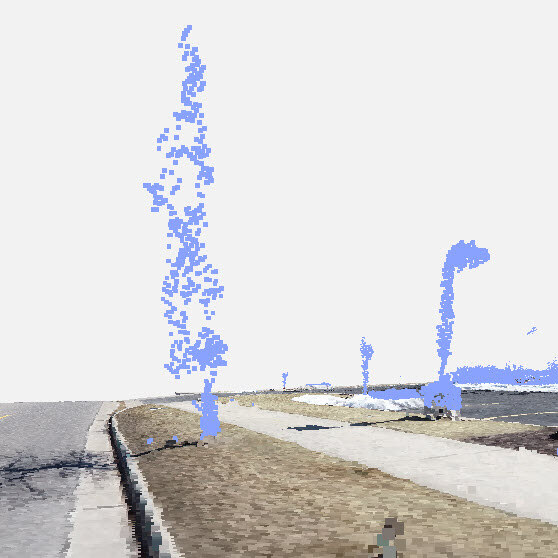
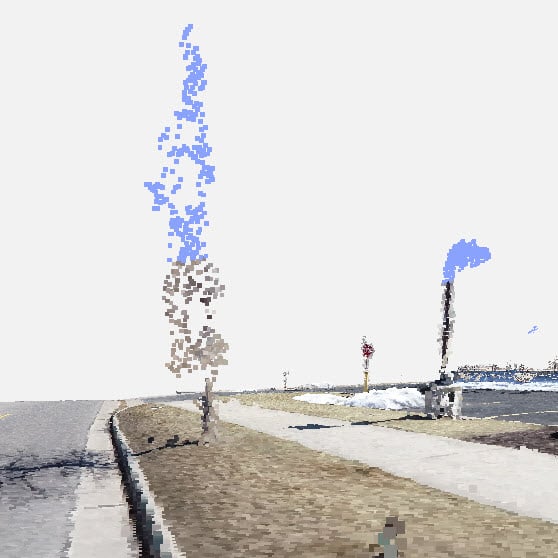
- Above Ground Threshold [units] (0.5 m, 1 ft - default): determines the maximum allowed distance between a point in the input point cloud and the surface generated based on the Sample distance and Rigidity parameters. The optimal value depends on the original density of the point cloud and on the quality of the reconstruction.
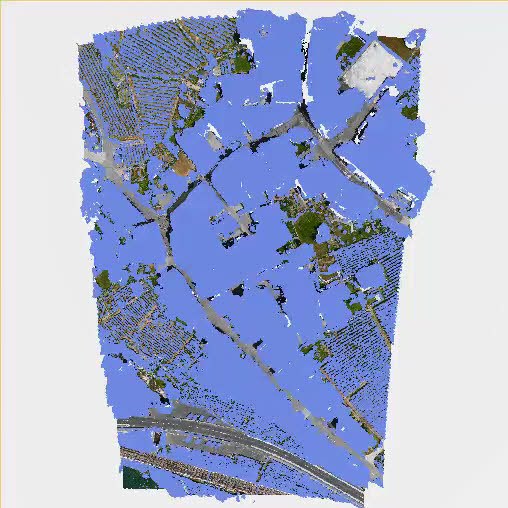
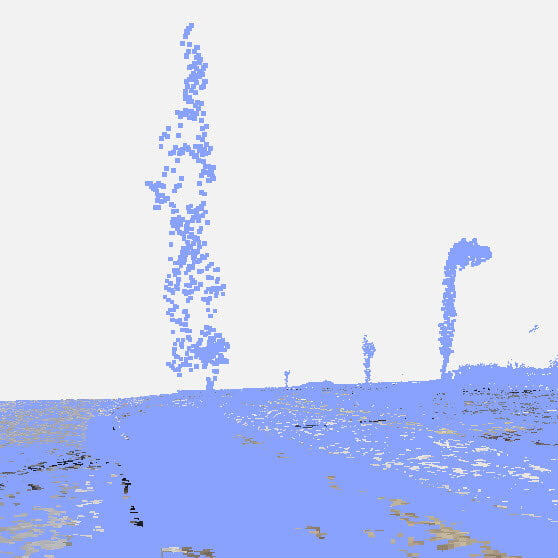
Example: Smaller Above ground threshold values include points closer to the ground into non-terrain class (blue color).
Results
Access: Results of the Terrain filter process are available in the Content -  Terrain classes panel.
Terrain classes panel.
The following terrain classes are available:
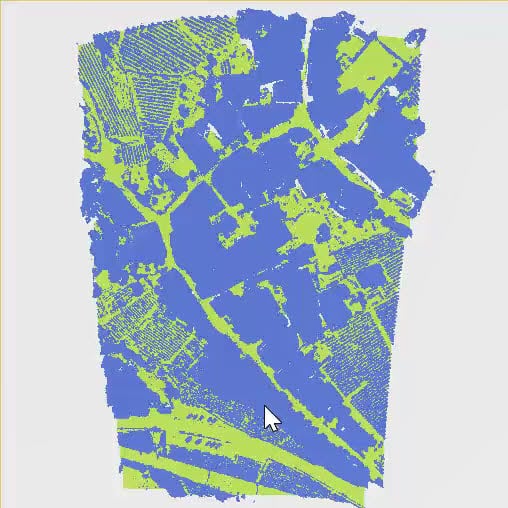
- Non-terrain (blue color): Points classified as non-terrain.
- Terrain (green color): Points classified as terrain.
- Never classified: Points corresponding to point clouds that were never classified.
To display terrain classes, both the Point clouds and Terrain classes visibility (![]() ) need to be selected. If the points are turned off in the Point clouds section, that will overrule the display of the terrain classes.
) need to be selected. If the points are turned off in the Point clouds section, that will overrule the display of the terrain classes.
To change the color display of terrain classes:
- For monochrome (default), click Show in monochrome
 .
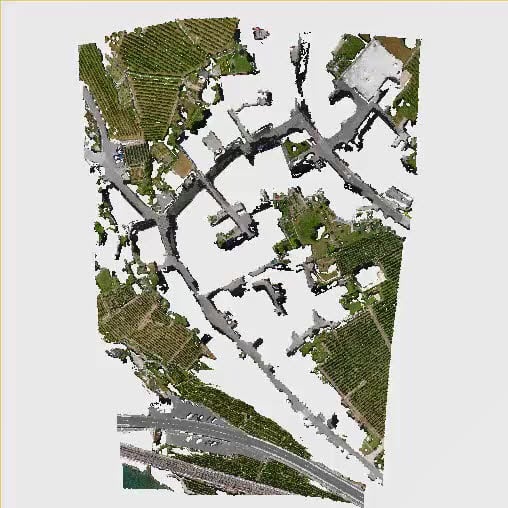
. - For RGB, click Show class in RGB
 .
.