PIX4Dcatch の「体積測定ツール」(英語) を使用することでアプリで直接体積を計算できるようになりました。このツールは、境界ポリゴンで定義されたベース面と、取得した点群間の体積を計算します。
ユーザーは、計算対象の体積を含むエリアを撮影するだけでよく、最小限の手動入力で、体積を短時間で計算することができ、すばやく結果を取得し現場でのフィードバックを可能にします。
体積を計算する - 手順
-
計算する体積を含むシーンを撮影します。
-
[プロジェクト] ビューで [体積計算] を選択します。
-
手動でポイントを追加して、体積のベース面を定義します。
-
体積を計算します。
-
結果を PDF レポートとしてエクスポートします。
体積計算 - 詳細説明
体積を計算するには、まず画面下部のツール アイコン ![]() をタップし、[体積計算]
をタップし、[体積計算]![]() を選択します。
を選択します。


重要: この機能を使用するには、PIX4Dcatch プロフェッショナル ライセンスと LiDAR カメラ搭載のデバイスが必要です。
[体積計算] を選択すると、ワークフロー全体を効率化するための高密度化処理が自動的に開始されます。この処理は、[キャンセル] ボタンをタップすることでいつでも中止できます。

体積を計算するには、画面をクリックしてポイントを追加して体積のベース面を定義する必要があります。

ヒント: より正確な結果を得るためには、2 本の指で点群を拡大して画面を動かし、体積のベース面を定義するために最適な向きを特定します。

トップ ビューに戻るには、アイコン![]() をクリックします。
をクリックします。
ポイントを削除するには、![]() アイコンをタップします。
アイコンをタップします。

特定のポイントの位置を変更するには、ポイントをタップして新しい位置にドラッグ & ドロップします。
特定のポイントを削除するには、ポイントをタップして画面下のごみ箱アイコンにドラッグ & ドロップします。

作成されたすべてのポイントを削除するには![]() アイコンをタップします。
アイコンをタップします。

体積のベース面を正確に定義するために、任意の数のポイントを追加できます。ただし、計算を開始するには最小でも 3 つのポイントが必要です。

ベース面が定義されたら [計算] をタップして体積の計算を開始します。処理の実行中は進行状況バーが表示されます。

計算が完了すると、体積の値がドロップダウン リストに表示されます。

ヒント: 体積には次の 2 種類があります。
切土体積: 取り除く対象物を表す切土体積は緑で表示されます (例: ストックパイル)。
盛土体積: 対象物を追加する盛土体積は紫で表示されます (例: 穴)。

体積はゴミ箱アイコンで削除できます。
メッシュ体積は点群上に表示されます。
ヒント: 計算された体積をより見やすくするには、メッシュ![]() アイコンをタップして点群を非表示にします。
アイコンをタップして点群を非表示にします。

各体積に対して、不確実性が計算され表示されます。
[保存] をクリックして、結果を PDF レポートまたは .csv ファイルとしてエクスポートします。

ファイルの保存場所を選択してください。


体積が計算されたら、体積の測定を含むレイヤーが生成され値が表示されます。このレイヤーは必要に応じて表示/非表示を切り替えられます。
体積の測定結果は、エクスポート アイコン ![]() を選択することで PDF または CSV ファイルとしてエクスポートできます。
を選択することで PDF または CSV ファイルとしてエクスポートできます。


体積の不確実性
体積の測定値は「計算された体積±不確実性」という不確実性として報告されます。これはつまり、体積は約 68 % の信頼度で「体積 - 不確実性」から「体積 + 不確実性」の範囲に収まると推定されます。信頼度が 95% および 99% の場合は、推定される区間はそれぞれ「体積 - 2 × 不確実性」および「体積 - 3 × 不確実性、体積 + 3 × 不確実性」です。
不確実性の推定は、点群のノイズ、完全性、密度など、さまざまな不確実性の要因を考慮した理論モデルに基づいています。このモデルは、RTK 受信機を使用することで防ぐことが可能なスケール 誤差やベース面の誤差は考慮にいれていません。この理論モデルは、さまざまな種類のオブジェクトに対して実験を行うことで、幅広い検証が行われています。
注: 詳細については「体積測定ツール」(英語) をご覧ください。
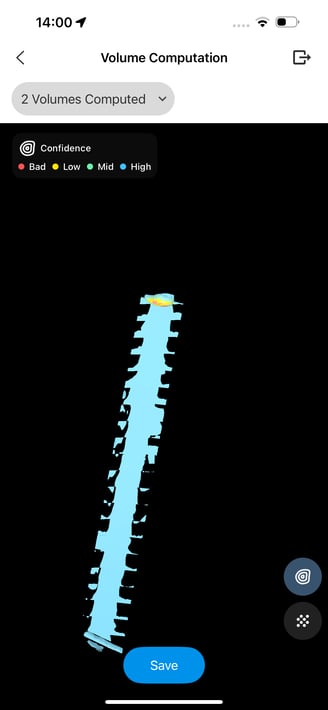
不確実性を表す体積メッシュで体積の信頼度を表示する
不確実性を表す体積メッシュとは
不確実性を表す体積メッシュは、計算された 3D 体積の各ポイントの信頼度レベルを視覚的に表します。この信頼度は体積データの信頼性を示し、ユーザーが測定の精度を評価するのに役立ちます。信頼度は、0 から 1 の値で表されます。
- 1 (高い信頼度): 信頼度の高いデータです。
- 0 (低い信頼度): 精度の低い可能性のあるデータです。
信頼度の値は色分けされた凡例で示され、信頼度の異なるエリアを素早く特定することができます。

信頼度の色分けされた凡例
不確実性を表すメッシュは色で信頼度レベルを表します。
 赤: 最も信頼度が低い値で、不確実性が著しく高いエリアを示します。
赤: 最も信頼度が低い値で、不確実性が著しく高いエリアを示します。 黄: 信頼度がいくらか低く、中程度の信頼性を示します。
黄: 信頼度がいくらか低く、中程度の信頼性を示します。 緑: 中程度の信頼度で、許容できるデータ品質であることを示します。
緑: 中程度の信頼度で、許容できるデータ品質であることを示します。 青: 最も信頼度が高い値で、データが高品質であるエリアを示します。
青: 最も信頼度が高い値で、データが高品質であるエリアを示します。


PDF レポート - 生成
結果を PDF レポートとしてエクスポートします。

編集可能な情報は以下のとおりです。
-
ファイル名: 既定の名前を編集するか、カスタム名で置き換えられます。
-
説明 (任意): レポートをエクスポートする前に説明を追加できます。
-
作成日: レポート作成日の固定値です。

[エクスポート] をタップします。
ファイルの場所を選択します。

撮影した点群のビューに戻ります。
PDF レポート - 詳細

PDF レポートの内容
PDF レポートの最初のページには以下の内容が含まれます。
-
ファイル名
-
作成日
-
説明
-
計算に使用された PIX4Dcatch アプリケーションのバージョン
計算された体積の数に応じて、1~2 ページ追加されます。

各体積の種類 (切士および/または盛土体積) には以下が含まれます。
-
計算された体積の値と関連する不確実性
-
ベース面を定義するポイントの 3D 座標を含む 3D エリアの値
-
ベース面を定義するポイントの 3D 座標を含む 3D 外周の値
-
体積の 3D ビュー
-
体積の上面図
正確な体積測定のためのベスト プラクティス
オブジェクトの全寸法を撮影する
-
オブジェクトの上面と底面の両方を含むオブジェクト全体を撮影して、正しい体積を計算します。
- 閉ループ撮影を実施し、空間の連続性を向上させます。
- 可能であれば、撮影の前に周囲の不要なオブジェクトを取り除きます。
正確な 3D モデルを取得する
- 信頼性の高い体積計算を得るには精密な点群が必要です。
- Autotag(英) を使用して 3D 再構築の品質を向上させます。
- 特に屋外環境の絶対精度を改善するには PIX4Dcatch に対応した RTK ローバーを使用してください。
体積のベース面を正確に定義する
-
ベース ポリゴンを描く際は、複数の視点を使用します。
-
ベースがオブジェクトのフットプリントと合致するよう、十分なポイントを追加します。
-
正しく配置されていないように見えるポイントは削除します。