How NTRIP works
To achieve centimeter-level accuracy, a base station at a known position follows a three-step process to send real-time corrections to a rover. First, the base station continuously monitors satellite signals. Second, it calculates the precise error by comparing its known location to the position derived from the satellite signals. Finally, it streams this correction data to the rover every second.
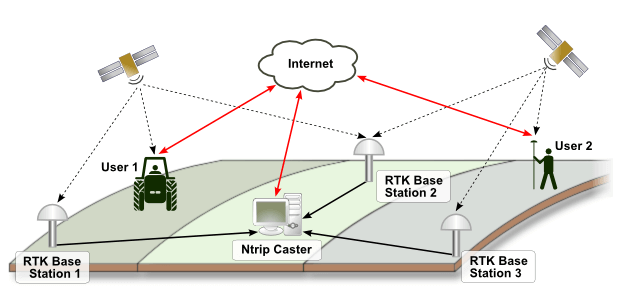
NTRIP Architecture
The NTRIP system consists of three primary components:
- The NTRIP caster: an HTTP Internet service, acting as a line of communication between the NTRIP server and NTRIP clients.
- The NTRIP server base station: transfers the data corrections from the NTRIP server base station to the NTRIP caster.
- The NTRIP client rover: the end-user device that receives correction data to perform Real-Time Kinematic (RTK) positioning via NTRIP reference stations.
NTRIP Service
To gain access to an NTRIP service, sign up for an NTRIP subscription with a provider. An NTRIP subscription service should include an IP address, a port number, a username, and a password for accessing the network service. These credentials will be used to connect the rover to the NTRIP network and receive corrections. The cost and coverage area depend on the specific service provider.
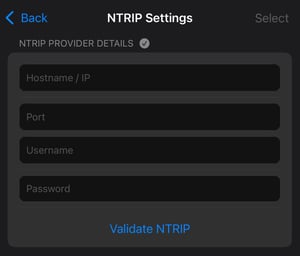
When entering the NTRIP credentials:
- Check the website of the NTRIP provider to find out which mountpoint is more suitable.
- Use the nearest reference station in the work area. In most cases, the nearest reference station is detected automatically.
- Reach out to the NTRIP provider for information on coordinate systems in which the NTRIP provider broadcasts their corrections. This is the coordinate system, for example, that needs to be selected as an Input coordinate reference system when using PIX4Dcatch with a supported RTK device.