IN THIS ARTICLE
How RTK Device Correction Works?
Best Practices When Capturing Data.
What to Avoid When Capturing Data?
This article explains how to capture accurate geospatial data using PIX4Dcatch RTK. It highlights best practices to improve accuracy and common mistakes to avoid when working with GNSS and RTK corrections.
PIX4Dcatch RTK uses satellite positioning combined with real-time corrections to achieve centimeter-level accuracy.
How RTK Device Correction Works?
The RTK (Real-Time Kinematic) device receives raw GNSS (Global Navigation Satellite System) signals and real-time correction data (via NTRIP), then computes a highly accurate position by applying those corrections internally.
- Your device (PIX4Dcatch RTK) receives satellite signals and NTRIP correction data.
- A fixed reference station (base station) receives satellite signals and calculates corrections.
- Corrections are delivered in real time through an internet service called NTRIP.
When these corrections are applied to your PIX4Dcatch RTK device, positioning accuracy can improve significantly—from meters to centimeters.
Best Practices When Capturing Data.
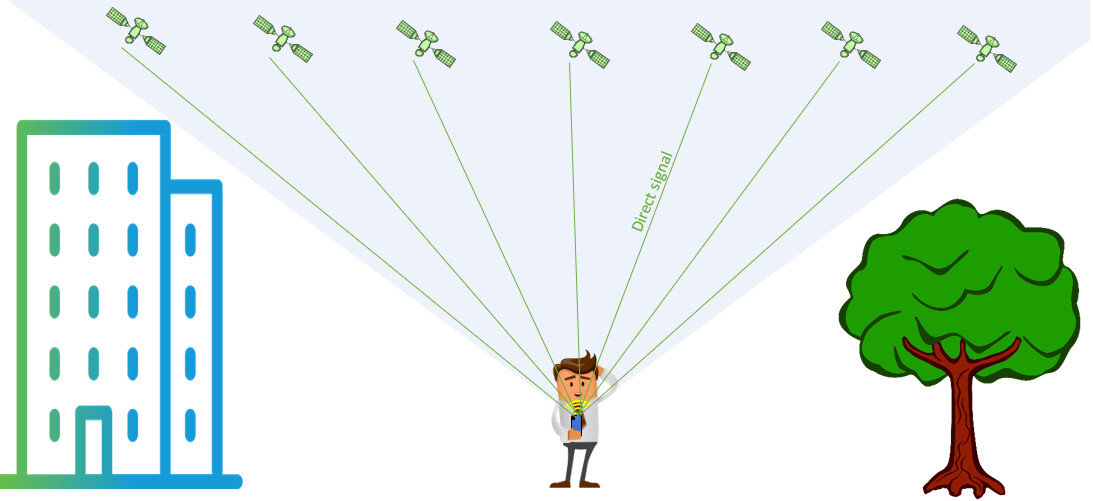
- Open Sky Environment: Stand in an open area with a clear view of the sky. Open-sky conditions help the RTK device receive strong and uninterrupted GNSS signals from satellites.
- RTK FIX: Wait for the PIX4Dcatch app to show RTK FIX before starting data capture. RTK FIX indicates that correction data is being applied and the device is providing its highest positioning accuracy.
- Internet Connection: Ensure you have a strong and stable internet connection. A reliable connection is required to receive RTK correction data through the NTRIP service.
- Select the Best Available Base Station: In the NTRIP settings, select the closest available base station (mount point) to your location. Using a nearby base station generally improves the accuracy and reliability of RTK corrections.
- Monitor Accuracy Values Continuously: Monitor the displayed accuracy values throughout data capture. If accuracy decreases, remain stationary and wait for the accuracy to stabilize before continuing
- Move Slowly and Steadily: Move at a consistent pace while capturing data. Slow and steady movement helps maintain stable positioning and improves data quality.
- Keep the Device Stable and Properly Oriented: Hold the device steadily and keep the antenna pointed upward throughout the capture process. Proper orientation helps maintain optimal satellite signal reception.
What to Avoid When Capturing Data?
-
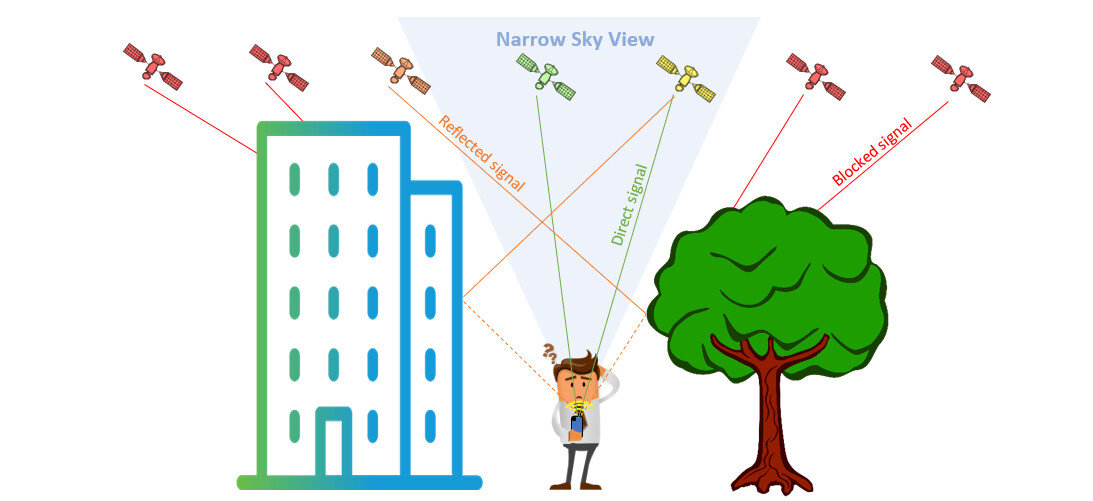
Obstructed Environments: Avoid capturing data near buildings, trees, bridges, or other structures that block the sky. Obstructions can interfere with GNSS signals, reducing RTK accuracy.
-
Starting Before RTK FIX: Avoid starting measurements before the system reaches RTK FIX. Capturing data without RTK FIX may result in lower positioning accuracy.
-
Poor Internet Connection: Avoid working in areas with weak or unstable internet connectivity. Connection interruptions can prevent the device from receiving RTK correction data.
-
Using a Distant or Inappropriate Base Station: Avoid selecting a base station that is far from your location or that is not appropriate for your project area. This can reduce the quality of RTK corrections and affect accuracy.
-
Ignoring Accuracy Warnings: Avoid continuing data capture when accuracy values decrease significantly. If accuracy drops, pause and wait for the positioning quality to improve before proceeding.
-
Moving Too Quickly: Avoid rapid or erratic movements while capturing data. Fast movement can affect positioning stability and reduce data quality.
-
Incorrect Device Orientation: Avoid excessive tilting or pointing the antenna away from the sky. Improper orientation can negatively affect satellite signal reception and positioning performance.