PIX4Dcatch 、モバイルデバイスの機能を最大限に引き出すために以下の機能を組み合わせた、地上データ収集のための強力なツールPIX4Dcatch :
- 画像取得。
- LiDARデータ取得*。
- RTK対応デバイスによるRTK測位
PIX4Dmatic 、こうしたデータセットの処理にPIX4Dmatic 、各データソースの独自の特性を組み合わせ、その利点を最大限に活かすための多くの機能を備えています。
目次
PIX4Dcatch をPIX4Dmaticにインポートする方法
PIX4DPIX4DmaticでPIX4Dcatch 処理する方法
キャリブレーション
深度点群
高密度化
深度と高密度データの融合
メッシュ
DSM
正射投影モザイク
エクスポート
PIX4Dcatch をPIX4Dmaticにインポートする方法
モバイルデバイス上でPIX4Dcatch が完了すれば、PIX4Dmaticを使用してエクスポートおよび処理を行う準備が整います。
- PIX4Dcatch アプリから、
 PIX4Dmaticで処理するプロジェクトを開きます。
PIX4Dmaticで処理するプロジェクトを開きます。 - モバイル端末でタップして、プロジェクトをエクスポートします すべてのデータをエクスポートする
 そして、ローカルフォルダに保存します。
そして、ローカルフォルダに保存します。
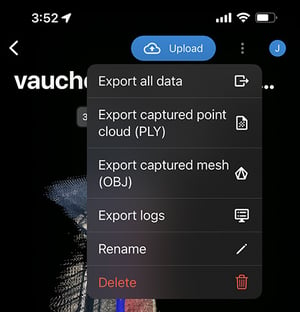
詳細はこちら: PIX4Dcatch エクスポート(iOS/Android)。
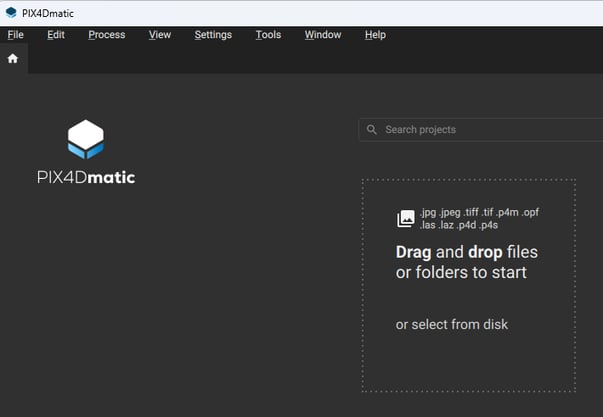
- プロジェクトデータを新しいディレクトリに抽出します。
- PIX4Dmaticを開く
 .
. - 新しいプロジェクトを作成するには、プロジェクトデータをインポートします。 _inputs このフォルダにはキャプチャされたすべてのデータが含まれており、その名もふさわしい projectname_inputs. キャプチャに使用したデバイスによって、このフォルダ内に表示されるファイルは異なります。
LiDAR対応デバイスで撮影されたプロジェクト。
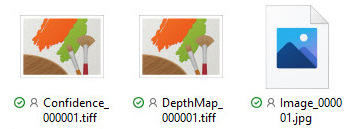
LiDAR対応デバイスで撮影されたプロジェクトをインポートする際は、すべてのConfidence.tiff、DepthMap.tiff、およびImage.jpgファイルをインポートしてください。Confidence.tiffおよびDepthMap.tiffファイルはLiDAR深度データを表し、Image.jpgファイルは画像コンテンツを表します。
LiDARデータがないプロジェクト

LiDAR対応デバイスを使用せずにキャプチャされたプロジェクトをインポートする場合、_inputsフォルダには画像の内容が反映されたImage.jpgファイルが含まれます。
GCPを活用したプロジェクト
PIX4Dmaticでは、オートタグ検出または手動でGCPをマーキングしたプロジェクトを簡単に処理できます。そのためには、ポイントデータとマーキングデータをプロジェクトにインポートする必要があります。両方のデータセットはZIPファイルに含まれています。
- をクリックしてください
 同点(0) 画面右下のタブをクリックして、タブを展開します。ドロップダウンメニューをクリックします
同点(0) 画面右下のタブをクリックして、タブを展開します。ドロップダウンメニューをクリックします 

- GCPをインポート...
ファイルを選択: .PIX4Dmatic.csv
出力座標系と形式を選択します。詳細については、以下を参照してください: タイ ポイント (GCPおよびチェックポイント)のインポート方法 -PIX4Dmatic - マークをインポート...
ファイルを選択:PIX4Dmatic.csv
最後に、「タイポイント」タブにGCPが追加され、画像上にマーカーが読み込まれます。
- をクリックしてください
PIX4DmaticでPIX4Dcatch 処理する方法
新しいプロジェクトを開き、すべてのデータをインポートすれば、PIX4Dmatic 処理準備PIX4Dmatic 。ほとんどの場合、PIX4Dcatch 処理にはデフォルトの処理オプションを使用できます。PIX4Dcatchの設定がいくつかあり、各セクションで強調表示されています。
校正
「キャリブレーション」 は処理の最初のステップです。良い出発点として、 PIX4Dcatch テンプレートを選択し、「Trusted」の位置・姿勢パイプラインを使用することです。
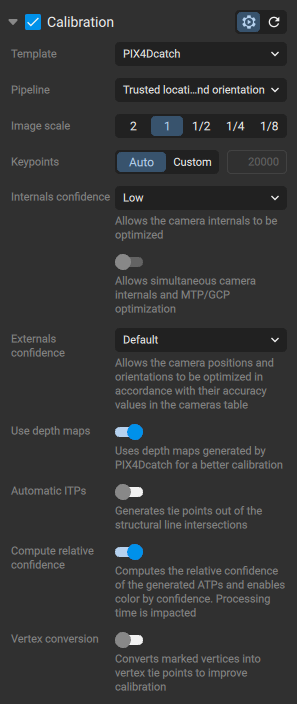
LiDAR深度データを使用してキャプチャされたプロジェクトでは、深度マップがデフォルトで利用可能かつ有効になっています。必要に応じて、これを無効にすることもできます。有効にしている場合、PIX4Dcatch で生成された深度マップがPIX4Dcatch 、より正確なキャリブレーションが可能になります。
Depth point cloud

その 深度点群 は、LiDAR深度マップから生成されます。このオプションは、LiDAR対応デバイスで撮影されたPIX4Dcatch でのみ利用可能です。
高密度点群
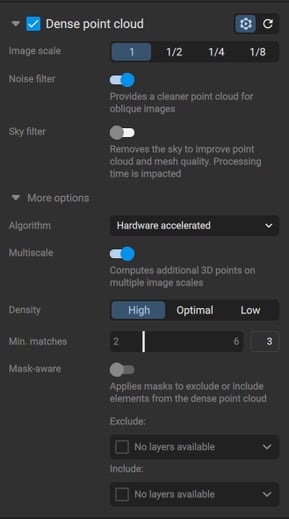
その 高密度点群 ステップでは、画像から高密度な点群を生成します。デフォルト設定の他に、PIX4Dcatch 直接役立つ2つのオプション設定があります。それらは「ノイズ」フィルターと「空」フィルターです。
-
ノイズフィルター
ノイズフィルタ処理オプションを使用すると、斜め撮影画像を含むデータセットに対して、よりクリアな点群データが得られます。
画像から遠く離れた位置で生成された点は除外されます。例えば、画像上には見えるものの地平線の彼方にある特徴点は、再構築されません。
例: ~のとき Noise filter 基地局プロジェクトでこの機能が有効になっている場合、画像から遠く離れた地点は再構築されません。

-
スカイフィルター
「空のフィルタ処理」オプションは、高密度な点群の中から空に関連する 点を除去します。
この機能は、画像に空が含まれているデータセットで特に役立ちます。例えば:
- PIX4Dcatchを使用して取得された地上データセット。
- PIX4Dscanで取得した測量データセット。
 重要:「空」フィルタ処理オプションを使用すると、処理時間が大幅に長くなります。画像内に空が多く含まれるデータセットでのみ使用することをお勧めします。
重要:「空」フィルタ処理オプションを使用すると、処理時間が大幅に長くなります。画像内に空が多く含まれるデータセットでのみ使用することをお勧めします。
Depth & dense fusion
その 深度および高密度融合 オプションは、画像から生成された点群とLiDAR深度マップから生成された点群を結合します。
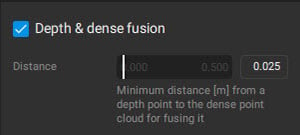
従来の写真測量では複雑な形状や均一なテクスチャの再構築が困難な領域において、融合された点群データは、多くの場合、より高密度で完全なものとなります。
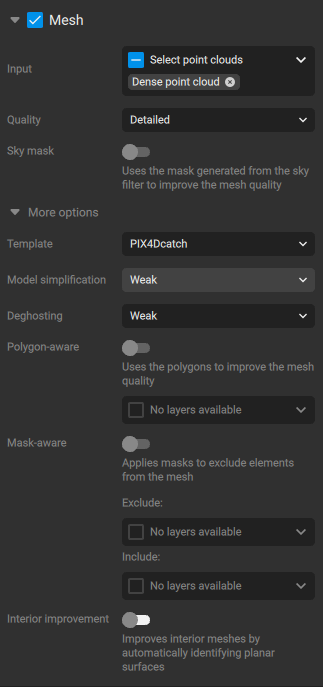
メッシュ
選択して3Dメッシュを生成します。「入力」および「テンプレート」フィールドには、PIX4Dcatchの設定項目があります。
-
入力
LiDAR深度マップPIX4Dcatch 処理する際、メッシュは以下のいずれかの点群を使用して生成できます:
- 高密度な点群データ。
- 深度点群。
- 高精度かつ高密度な融合点群。
-
Template
地上プロジェクト向けに最適化されているため、PIX4Dcatch を選択してください。
メッシュに関するすべての設定は、「処理オプション - メッシュ」にまとめられています。被写体に応じて、最も正確な再構築が得られるオプションを選択してください。
DSM
選択してデジタル表面モデル(DSM)を生成します。「入力」フィールドには、PIX4Dcatchの設定項目があります。
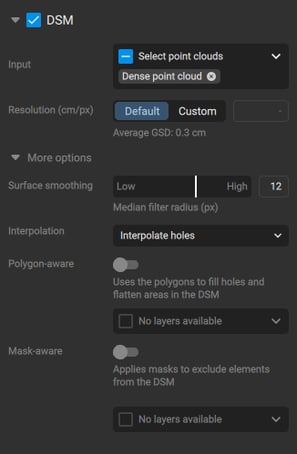
-
入力
LiDAR深度マップを含むPIX4Dcatch 処理する際、DSMは以下のいずれかの点群データを使用して生成できます:
- 高密度な点群データ。
- 深度点群。
- 高精度かつ高密度な融合点群。
DSMの設定については、「処理オプション - DSM」にすべて記載されています。被写体に応じて、最も正確な再構成が得られるオプションを選択してください。
オルソモザイク
これを選択してオルソモザイクを生成します。「斜め撮影」および「ゴースト除去」のトグルスイッチを使用すると、PIX4Dcatch 画質を向上させることができます。
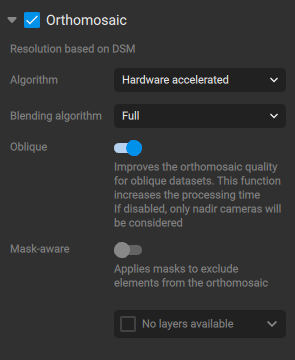
オルソモザイクの設定については、「オルソモザイク -PIX4Dmatic」にすべて記載されています。被写体に応じて、最も正確な再構築が得られるオプションを選択してください。
輸出
各処理オプションについて、必要なエクスポート項目と品質レポートを選択してください。
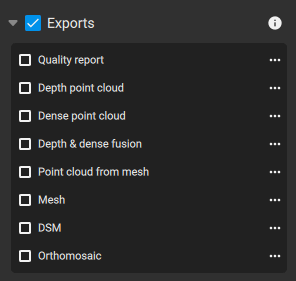
LiDAR深度マップPIX4Dcatch 処理する場合、処理オプションが選択されていれば、各点群.lasファイルのエクスポートオプションが利用可能になります。DSMおよびオルソモザイクをエクスポートする際には、さらに考慮すべきオプションがあります。これらのエクスポート設定については、それぞれの記事「処理オプション - DSM」および「オルソモザイク -PIX4Dmatic」で解説されています。