ライセンス:この記事は、PIX4Dcloud およびPIX4Dcloud (旧PIX4Dcloud )のライセンスに適用されます。
権限: PIX4Dcloud では、オーナー、マネージャー、およびエディターのみがデータセットの作成、処理、共有を行うことができます。
ご注意:データセットがベストプラクティスを満たしていない場合、または以下で説明する機能以上の処理を必要とする場合、消費された利用枠またはクレジットは返還されません。
目次
ベストプラクティス
- 再構築したいプロジェクトエリアや対象物に応じて、ミッションを計画し、画像を撮影します。
- 適切な地上解像度で画像を撮影してください。
- 細部までくっきりと写り、十分なコントラストのある画像を撮影してください。
- データセットに適した処理オプションを選択してください。
- (任意)GCPを使用するか、RTKドローンで画像を撮影することで、絶対精度を向上させます。
機能
PIX4Dcloudのベストプラクティス
再構築したいプロジェクトエリアや対象物に応じて、ミッションを計画し、画像を撮影します。
どのような用途においても、露出過多または露出不足の画像を撮影することは推奨されません。こうした画像では良好な結果が得られないためです。
 |
 |
 |
| original image | strongly overexposed image | strongly underexposed image |
一般的なケース
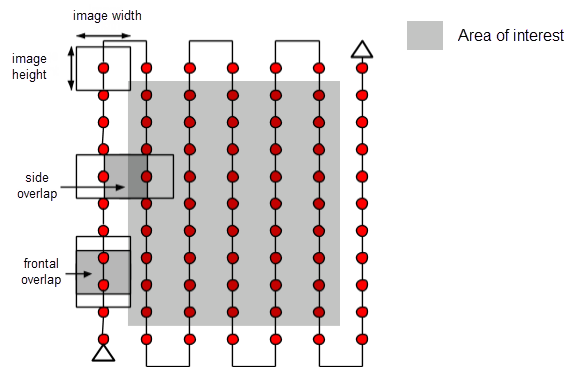
ほとんどの場合、推奨されるオーバーラップ率は、 正面方向(飛行方向に対して) で少なくとも75%、 側面方向( 飛行経路間) で少なくとも60%です 。画像は規則的なグリッドパターンで撮影することを推奨します(図1)。所望のGSDを確保するため、カメラは地形や被写体の上空で可能な限り 一定の高度を保つようにしてください。
森 森と生い茂る植物
木々や密生した植生は、その複雑な形状(何千本もの枝や葉)のため、重なり合う画像間で外観が大きく異なることがよくあります。そのため、画像間で共通する特徴点(キーポイント)を抽出することはより困難です。良好な結果を得るためには、「一般的なケース」のセクションで説明されているようなグリッド画像取得プランを使用し、以下の変更を加えることをお勧めします:
- 画像間の重なりを、正面および側面において少なくとも85%にする。
- 飛行高度を上げる:高度が高くなると、遠近感による歪みが少なくなり(その結果、外観上の問題も減少する)、植生が密な地域でも視認性が向上します。つまり、こうした地域では、重なり合う画像間の視覚的な類似性を検出するのが容易になります。飛行高度、画像のピクセル解像度、および焦点距離によって、画像の地上サンプリング距離(空間解像度)が決まります。GSDが10cm/ピクセルを超える場合に、最良の結果が得られます。
平坦な土地に農地が広がっている
農地など、地勢が平坦で視覚的な特徴が均一な場合、画像間で共通する特徴点(キーポイント)を抽出するのは容易ではありません。良好な結果を得るためには、「一般的なケース」のセクションで説明されているようなグリッド形式の画像取得計画を採用し、以下の変更を加えることをお勧めします:
- 画像間の重なりを、正面および側面において少なくとも80%にする。
- もっと高く飛べ。たいていの場合、高く飛べば結果が良くなる。
建設 建物の改修
3D建物の再構築には、特定の画像取得計画が必要となります(図2):
- カメラのピッチ角を調整し、画像の大部分が再構築したい対象で占められ、再構築したくない対象が画像のごく一部になるようにします。すべてのミッションに通用する唯一のカメラのピッチ角というものは存在しません。
- 建物を2周目、3周目と周回しながら、周回ごとに飛行高度を上げ、カメラアングルを低くしていく。
- 被写体の大きさや距離に応じて、十分な重なりを確保するため、5~10度ごとに1枚ずつ撮影することをお勧めします。
- 飛行高度は、飛行ごとに最大2回まで上げるべきである。高度が異なると、空間分解能も異なるためである。
- PIX4Dcloud 、建物の斜め撮影画像から高品質な点群データをPIX4Dcloud 。
特例
このセクションでは、雪や砂、湖など、地図化が難しい地形に関するヒントをいくつか紹介します。
雪や砂は、広大で均一な広がりを持つため、視覚的な要素がほとんどありません。したがって:
- 重なり率を高く設定してください:正面の重なり率は85%以上、側面の重なり率は70%以上にしてください。
- 各画像で可能な限りコントラストを高めるよう、露出設定を適切に調整してください。
水面は広大で均一な領域であるため、視覚的な情報がほとんどありません。水面の太陽の反射や波は、視覚的な照合には利用できません。
- 海を 元通りにすることは不可能です 。
- 各画像には、河川 や 湖などの水面の形状を復元するために、陸地やその他の静止した物体が含まれている必要があります。より高い高度から撮影することで、より多くの地表の特徴を捉えることができる場合があります。
回廊のマッピング
鉄道、道路、河川などの回廊をマッピングするには、少なくとも2本の飛行ラインが必要です(図3)。GCPは必須ではありませんが 、再構築の精度を高めるために推奨されます 。回廊マッピングにおけるGCPの数と配置に関する詳細については、「回廊マッピングにおける地上基準点(GCP)の数と配置」を参照してください。
デュアルトラックの場合、正面衝突時のオーバーラップ率は少なくとも85%、側面衝突時のオーバーラップ率は少なくとも60%とすることを推奨します。
真上からの画像または斜めからの画像を使用することができます。平坦な地形の場合は、真上からの画像の使用をお勧めします。
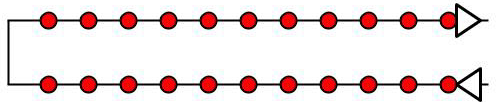
デュアルトラック画像取得計画が実施できない場合、以下の条件を満たせばシングルトラック画像取得計画を採用することができる(図4):
- オーバーラップ率は十分に高い:正面衝突時のオーバーラップ率は少なくとも85%である。
- 地上基準点(GCP)は、飛行経路に沿ってジグザグ状に配置されます。

大型の垂直物体の再構築
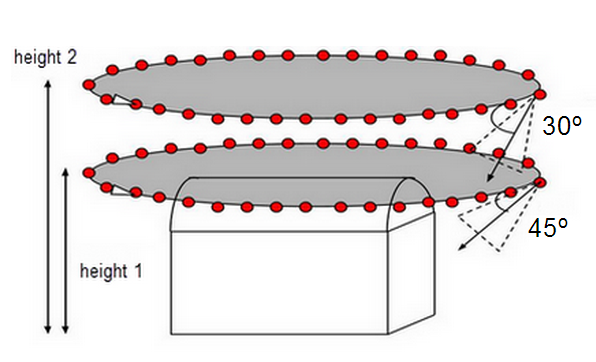
背が高く細長い物体の3D再構築には、特定の画像取得計画が必要となる(図8):
- 構造物の近くを飛ぶ。
- その構造物の周囲を、いくつかの高さで数回旋回してください。
- 画像は、十分な重なりを持たせて撮影してください。同じ高さで撮影した画像間では90%、異なる高さで撮影した画像間では60%の重なりを確保してください。
- 画像フレーム内のすべての被写体がピントが合っている必要があります。これには、撮影範囲外にある背景の物体も含まれます。
- 画像に位置情報が付いていることが推奨されます。

パワータワー

rayCloudで再構築されたパワータワー
適切な地上解像度で画像を撮影してください。
この記事では、地上サンプリング距離(GSD)とは何か、そしてその計算方法について解説します。
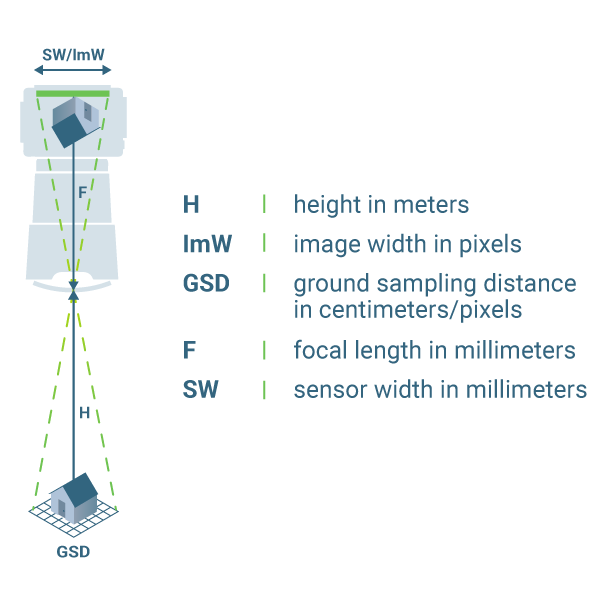
地上サンプリング距離(GSD)とは、地上上で測定された2つの連続するピクセルの中心間の距離のことです 。画像のGSDの値が大きいほど、画像の空間分解能は低くなり、詳細が鮮明に見えなくなります。
GSDは、以下の要素に基づいて算出されます:
- 飛行高度/地表または物体からの距離 (H)。
- その カメラの仕様:
- 画像の幅 (ImW)。
- センサー幅(SW)。
- 焦点距離(F)
- GSD計算用自動ツール: ツール - GSD計算ツール.
- 希望する地上サンプリング距離とマッピング対象の地形を考慮して、カメラの焦点距離と飛行高度をどのように選定するか:希望する地上サンプリング距離とマッピング対象の地形を考慮して、カメラの焦点距離と飛行高度をどのように選定するか?
- 異なる飛行高度で撮影された画像は処理できますか?:異なる飛行高度/GSDで撮影された画像の処理方法。
プロジェクトの要件に合わせて飛行高度やカメラの仕様を調整するため、画像取得を開始する前にGSD値を決定しておくことが重要です。例えば、対象エリアの詳細な再構築が必要な場合は、対象物により近づいて飛行すること(低GSD)をお勧めします。 一方、非常に詳細な結果を必要としない広範囲をカバーする場合は、より高い高度(高GSD)で飛行することで、撮影時間や必要なバッテリー量を大幅に削減できるほか、処理時間も短縮できます。
- GSDが5 cmということは、画像上の1ピクセルが、地上では直線距離で5 cm(5×5=25平方センチメートル)に相当することを意味します。
- GSDが30 cmということは、画像上の1ピクセルが、地上では直線距離で30 cm(30×30=900平方センチメートル)に相当することを意味します。


細部までくっきりと写り、十分なコントラストのある画像を撮影してください。
細部までくっきりと、コントラストも十分に効いた画像を撮影するには、以下の点に留意してください。
Camera Settings
The shutter speed, aperture, and ISO should be set on automatic. If images are blurry or noisy, it is recommended to manually set these parameters.
There is a tradeoff between the shutter speed, the aperture, and the ISO sensitivity. For processing, the images should be sharp and have the least amount of noise. Such images can be obtained when the scene is well illuminated (scattered clouds should be avoided), and the camera parameters are well adjusted. If the scene is not sufficiently illuminated, images will be noisier and less sharp, thus lowering the accuracy of the results.
- 大まかな目安として、シャッタースピードは固定し、ISO感度はノイズの発生しない低い値に設定し、被写界の明るさの変化に対応できるよう、絞りは自動に設定する必要があります。このバランスが適切でないと、露出オーバーや露出不足の画像になってしまう可能性があります。
シャッタースピードは固定し、中速(目安として1/300秒から1/800秒の間)に設定しますが、画像がブレない程度の速さにする必要があります。画像の5%以上に方向性のブレが見られる場合は、シャッタースピードを少し上げるべきだという良い指標となります。
ISOは可能な限り低く(最低100)設定してください。 ISO感度を高く設定すると、一般的に画像にノイズが発生し、画質が大幅に低下します。
絞りの最小値と最大値はレンズによって異なります。絞りが開いているほど数値は小さくなり、例えばf2.7(多くの光を取り込む)となります。シャッタースピードとISO感度の両方を調整する場合は、絞り(f値)は自動設定のままにしておくのが良いでしょう。 - 電子式および機械式の手ぶれ補正機能は、Pix4D ソフトウェアのアルゴリズムに干渉するため、無効にしてください。
- 推奨されるフォーカスモードは「マニュアルフォーカス(無限遠)」です。このフォーカスモードであれば、航空撮影プロジェクトでは常にピントの合った画像が得られます。地上撮影プロジェクトの場合、長焦点距離のレンズを使用すると、このモードではピントが合っていない画像になる可能性があります。
Problems with images due to wrong camera parameters or inadequate equipment that interfere with the processing:





データセットに適した処理オプションを選択してください。
PIX4Dcloud 、ユーザーが処理したい飛行の種類に応じて、さまざまな処理オプションPIX4Dcloud 。推奨されるオプションは以下の通りです:
| フライトの種類とデータセット | おすすめの処理オプション |
| ナディールRGB画像 | ナディール・フライト(3Dマップ) |
| 斜めRGB画像 | 斜行飛行(3Dモデル) |
| 地上からのRGB画像 | PIX4Dcatchからアップロード |
| 360度画像 | Not supported |
| マルチスペクトル画像 (*) | Not supported |
|
農地のRGB画像
|
平坦な地形でのナディール飛行(3Dマップ) |
| 熱画像(**) | Not supported |
(*) マルチスペクトル画像はサポートされていません。PIX4Dmapper PIX4Dfields での処理PIX4Dfields 。
(**) サーマル RJPG 画像はサポートされていません。サーマル JPG グレースケール画像のみサポートされていますが、放射測定誤差、スケールの問題、およびキャリブレーションの不正確さが生じる可能性があるため、この形式の使用はお勧めしません。
- フライトに不適切な処理オプションを選択すると、望ましくない結果につながる可能性があります。
- PIX4Dcloudでは、360度パノラマ画像の処理には対応していません。
詳細については、「新しいデータセット」>「処理オプション」 -PIX4Dcloud をご覧ください。
(任意)GCPを使用するか、RTKドローンで画像を撮影することで、絶対精度を向上させます。
PIX4Dcloud 最終結果(オルソモザイク、DSM、点群、およびDSM)の予想される絶対精度は、以下の要因によってPIX4Dcloud :
画像の位置情報の精度
*ppm:100万分の1(1kmあたり1mm)
- X、Y方向の精度 → 1 cm + 2 × (5 mm) = 1.1 cm
- Z方向の精度 → 2 cm + 2 × (5 mm) = 2.2 cm
詳細については、「空撮カメラから測量ツールへ:RTK/PPKドローンのアップグレード」をご覧ください。
GCPの活用
地上基準点(GCP)を使用する場合、標準的なドローンであっても、結果の絶対精度はGCPの絶対精度と同等になります。例えば、GCPの精度が約2~3cmであれば、最終結果においても同程度の絶対精度が期待できます。
詳細情報:RTK、PPK、ドローン、GCP――どれがより良い結果をもたらすか?
PIX4Dcloud ライセンスには、GCP を使用して精度を向上させる「AutoGCP」機能が含まれています。この機能の利用要件については、こちらをご確認ください。
PIX4Dcloudの機能
以下の要件が満たされている場合、PIX4Dcloud GCPを自動的に検出PIX4Dcloud 。
画像およびGCPの要件
AutoGCP検出アルゴリズムを正常に動作させるには、画像およびGCPに関して以下の要件を満たす必要があります。詳細情報やベストプラクティスについては、「ターゲットの自動検出 - AutoGCPアルゴリズム」をご覧ください。
画像の要件
- 画質は良好でなければなりません(ぼやけていたりコントラストが低かったりすると、アルゴリズムが正常に動作しなくなります)。
- 画像にはWGS84(EPSG:4326)の地理座標情報を付与する必要があります。
- 画像の位置情報の精度は、水平方向で5メートル以下、垂直方向で10メートル以下でなければならない。
- 画像は真上(ナディール)またはわずかに斜め上から撮影する必要があります。
GCPの要件
- 正方形、斜め、およびエアロポイントのターゲットに対応しています。
- 推奨サイズは、プロジェクトの平均GSDの20倍以上とする。
例:プロジェクトの平均GSDが2.5 cm(1インチ)の場合、推奨されるターゲットサイズは50 cm(20インチ)です。
- 白黒のターゲットに対応しています。状況によっては、他の色でも機能する場合があります。
- GCPは、互いに少なくとも10メートルの間隔を空けて設置しなければならない。
- GCPには投影座標系が設定されていなければならない。

PIX4Dcloud 、処理用に最適化されたデフォルトの設定PIX4Dcloud 。
- ナディール飛行(3Dマップ): これは、高いオーバーラップ率で、主に地面に向けて撮影されたグリッド飛行計画を用いて取得された航空RGB画像に最適です。代表的な用途としては、採石場や地籍測量などが挙げられます。
- 斜め撮影(3Dモデル):斜め航空写真(自由飛行)など、重なりが多いRGB画像に最適です。用途例としては、建物や物体の3Dモデル、点検などが挙げられます。

- 飛行データに問題がなく、画像の品質も十分であるにもかかわらず、デフォルトのパラメータでは誤った結果が得られることがあります。
- 処理オプションを変更する必要がある場合は、代わりにPIX4Dmatic 他のソフトウェアパッケージを使用PIX4Dmatic
PIX4Dcloud 、再構築モデルの生成と表示はPIX4Dcloud 、編集はできません。
PIX4Dcloud 、オルソフォト、デジタル表面モデル(DSM)、NDVIインデックス、点群データ、3Dメッシュなど、さまざまな出力結果をPIX4Dcloud 。なお、PIX4Dcloudできない点にご注意ください。
必要な編集PIX4Dsurvey 、PIX4DmaticやPIX4Dsurvey などの代替製品のご利用をお勧めします。
PIX4Dcloud 、一定サイズまでのデータセットを処理PIX4Dcloud 。
PIX4Dcloud 、プロジェクトの特性、処理オプション、および要求された出力形式に応じて、一定数の画像を正常に処理PIX4Dcloud 。
- PIX4Dcloud 最大4000枚PIX4Dcloud 、すべてのケースで処理が可能というわけではありません。画像のサイズ、オーバーラップ率、プロジェクトの形状、生成する出力形式によっては、4000枚未満であっても処理が失敗する場合があります。これは特に、高解像度カメラ(4200万画素以上)を使用する場合や、オーバーラップ率の高いプロジェクト(斜め撮影など)において顕著です。詳細については、こちらの記事をご覧ください。
- PIX4Dcloud supports uploading images within 12 hours.
PIX4Dcloud 、一定サイズまでの再構築データを表示PIX4Dcloud 。
データセットは、アップロードされた結果のみで構成される場合があります。この場合、画像は処理されませんが、アップロードされたファイルは、Web上での表示および最適化のために処理されます。
アップロードおよび結果として表示できる写真測量ファイルは、以下の通りです:
- オルソモザイク (.GeoTIFF)、
- DSM (.GeoTIFF)、
- インデックス(.GeoTIFF):NDVIマップまたはその他のインデックスマップ
- 点群データ(.las、.laz)、
- 3Dテクスチャ付きメッシュ(.obj)。
ファイルのアップロードに関しては、ファイルサイズや形式にいくつかの制限があります:
- オルソモザイク:GeoTIFF形式の単一ファイルに対応、最大50 GB
- DSM:GeoTIFFファイルは1ファイルのみ対応、最大50 GB
- インデックス:GeoTIFFファイル1つのみ対応、最大50 GB
- 点群データ:LASまたはLAZ形式のファイルを1つまで対応しています。
- 3Dテクスチャ付きメッシュ:OBJ+MTL+JPGの単一ファイルセットに対応
- ファイルサイズ:最大1 GB。
- JPG:最大16k×16k。
PIX4Dcloud 、処理にデフォルトのパラメータPIX4Dcloud 。
PIX4Dcloud 使いやすさを重視して設計されたWebベースのソフトウェアPIX4Dcloud 、写真測量に関する専門知識がなくても利用できます。本ソフトウェアでは、さまざまな飛行シナリオに合わせて最適化されたデフォルトパラメータセットが使用されます。これらのパラメータは変更できません。