重要: PIX4Dcatch サイト位置特定機能は、Android端末でのみPIX4Dcatch 。iOS端末ではサイト位置特定機能はサポートされていません。
PIX4Dcatch「サイト位置決め」機能により、ローカル座標系での作業が可能となり、ローカル座標系とグローバル座標系の間で座標を変換することができます。既存の座標データをインポートしたり、現場で新たに座標を測定したりすることが可能です。座標の取得には、PIX4D RTKPIX4Dcatch 、または任意のサードパーティ製デバイスを使用することができます。
目次
新しいポイントコレクションを作成する
ローカルポイントを追加
ローカルポイントをインポート
ローカルポイントを定義する
グローバルポイントを追加
グローバルポイントの測定
グローバル座標点をインポート
ポイントをリンク
サイトの位置特定を計算
残差
計算されたサイト位置情報オプションと出力
WKTファイルのエクスポート
サイト位置情報の編集
位置特定済みファイルのエクスポート
結果の確認
サイト位置特定済みプロジェクトの処理
ローカライズされたプロジェクトをPIX4Dcloud /PIX4Dcloud にアップロードして処理
PIX4Dmatic / PIX4Dmatic Proでローカル処理
新しいポイントコレクションを作成する
- メイン画面から、[ ] をタップします。 「ニュー・ポイント」コレクション ボタン
 を開くには ポイント管理 ダイアログ。
を開くには ポイント管理 ダイアログ。 - をタップして
 ボタンをクリックして、ポイントを保存する新しいポイントコレクションを作成します。
ボタンをクリックして、ポイントを保存する新しいポイントコレクションを作成します。

- 「サイトのローカライズ」をタップします。
- ポイントコレクションの名前を入力し、「作成」をタップします。
新しいポイントコレクションが作成され、ポイントの登録が可能になりました。
サイトロケーションを行う際、グローバル座標系とローカル座標系の2つの座標系が暗黙的に定義されます。グローバル座標系はグローバルポイントに使用され、パラメータが既知の定義済み座標系です。サイトロケーションでは、地理座標参照系のみを使用できます。これは、測定値やインポートされたポイントが常に度単位で表されることを意味します。 ローカル座標参照系は、ユーザーが定義するカスタムシステムです。これには、任意の原点、方位、および縮尺が含まれます。メートル、フィート、または米国測量フィートなどの既知の単位が定義されます。
グローバル座標系は、点のインポートまたは測定時に定義されます。このステップでは、座標参照系は「未定義」となります。
地域ポイントを追加
新しいポイントコレクションを作成すると、ポイントの追加を開始できます。まずローカルポイントを追加し、その後、グローバルなポイントの計測とリンクを行います。新しいローカルポイントは、インポートするか手動で追加することができます。グローバルポイントは、ローカルポイントにリンクする際に、Pix4D デバイスを使用して計測できます。ポイントが計測されると、そのコレクションの座標系が定義されます。

ローカルポイントは、.csvファイルからインポートするか、既知のローカル座標を手動で入力して定義することができます。
ローカルポイントをインポート
- 6つの列:ポイントラベル、東経、北緯、標高、水平精度、垂直精度
- 4つの列:ポイントラベル、東座標、北座標、高さ
- をタップして
 ボタン。
ボタン。

- [任意のCRS] タブを選択します。
- を選択してください 測定単位.
- メートル(m)
- 米国フィート(USft)
- 国際フィート (ft)

- 軸の向きを選択.
インポートした点の軸の向きを選択してください。ファイルの構造を表す向きを選択してください。つまり、どの列が東座標で、どの列が北座標であるかを選択してください。
ヒント:ヨーロッパ諸国では通常、東経座標と北緯座標の順で表記されますが、北米では北緯座標、その後に東経座標の順で表記されます。
- 「インポート」を選択します。
インポートされたポイントは、「ポイント」コレクションに一覧表示されます。

新しくインポートされた各ローカルポイントには、以下の情報が含まれています:
- ポイントラベル名。
- 「輸入品」と「国産」のタグ。
- 水平・垂直の精度(ファイルに含まれている場合)。
- 測定単位と連動します。
- インポート日。
- リンクアイコン - コレクションにグローバルポイントがない場合、このアイコンはグレー表示になります。
- 測定アイコン -PIX4D RTKデバイスを使用して、その地点を測定します。
ローカルポイントをインポートしたため、グローバルポイントを追加できるようになりました
局所点を定義する
ローカル座標が記載された.csvファイルがない場合でも、既知のローカル座標を手動で入力して、ポイントコレクションにローカルポイントを追加することができます。
- ~より ポイントの集計、 をタップ
 ボタン。
ボタン。

- [ローカル位置] タブを選択します。
- 入力:
- ローカルポイント名(任意)。
- 東経、北緯、および高度(楕円体座標)
- 水平・垂直精度(オプション)。
- タップ ローカル座標を保存.

- 測定単位を選択してください(この設定は最初に入力したポイントに対して適用され、その後にコレクションに入力されるポイントの測定単位を決定します。)
- 現在地の登録が完了しました。
ポイントコレクションにローカルポイントが追加されたことで、グローバルポイントの追加や連携が可能になりました。
グローバルポイントを追加
「ポイントコレクション」内のローカルポイントを使用すれば、PIX4D デバイスでグローバルポイントを測定したり、.csvファイルからインポートしてローカルポイントをグローバル基準に紐付けたりすることができます。両方の座標系に少なくとも3つの既知点があれば、ローカルポイントとグローバルポイント間の変換を計算できます。可能な限り、適切な分布と間隔でより多くのポイントを測定することをお勧めします。
このデータセットのグローバル座標系は、最初にインポートまたは測定されたグローバル座標点によって定義されます。それ以降のすべての測定は、この基準点に基づいて行わなければなりません。
グローバルポイントの測定
- ~より ポイントの集計、全体を測定する局所的なポイントを選択し、 Measure icon
 .
.

- その Global Position 「タブ(既定)」が選択されている必要があります。

- 入力:
- グローバルポイント名(任意)。
- アンテナの高さ/高度補正(オプション) レーザーを使用せずに測定する場合の入力値。
- 参考写真(任意)。
- 説明(任意)。
- 測定時間。30秒以上を推奨します
- タップ Measure.

測定が完了すると、その点はグローバル座標系およびローカル座標系に紐付けられます。紐付けられた点が3つ以上あれば、計算を実行できます。所定の精度範囲外に残差がある点を削除できるようにするため、3つ以上の点を紐付けることをお勧めします。
3つ以上の連結された点があれば、その地点の位置を特定することができます。
グローバルポイントをインポート
ローカルポイントのインポートと同じ方法で、グローバルポイントをインポートすることができます。
- 6つの列:ポイントラベル、東経、北緯、標高、水平精度、垂直精度
- 4つの列:ポイントラベル、東座標、北座標、高さ
「ポイント・コレクション」より:
- ドロップダウンメニューを選択してください
 そして、 Import file アイコン
そして、 Import file アイコン .
.

- グローバルポイントが含まれている.csvファイルを選択してください。

- [既知のCRS] タブを選択します。
- インポートする点の座標系を指定してください。
- 軸の向きを選択.
インポートした点の軸の向きを選択してください。ファイルの構造を表す向きを選択してください。つまり、どの列が東座標で、どの列が北座標ですか?
- 「インポート」をクリックします。
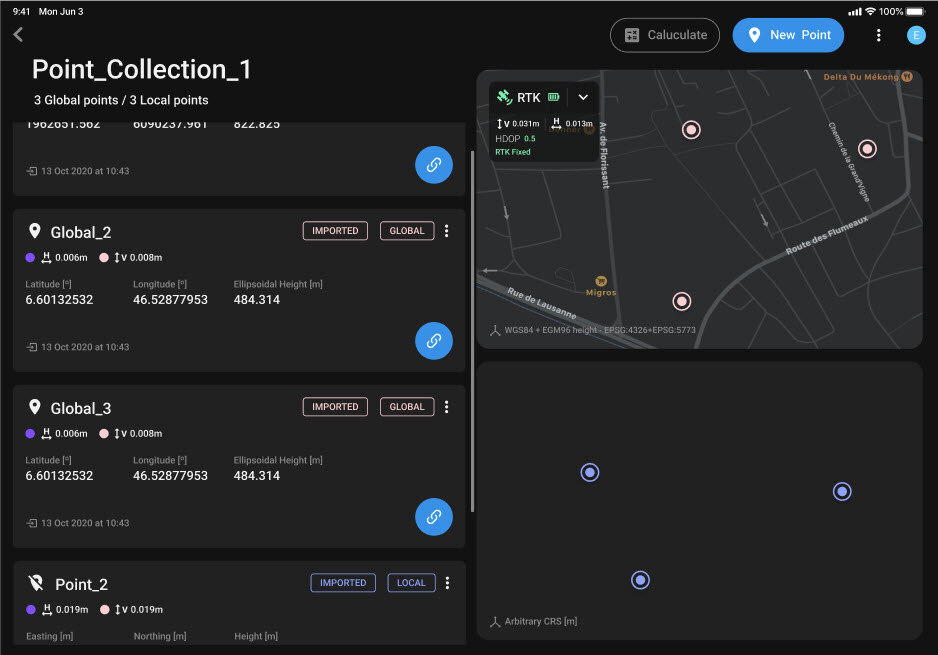
グローバルポイントは、それぞれのタグとともにポイントコレクションに保存され、地図上に表示されます。サイト位置特定ポイントコレクションにグローバルポイントとローカルポイントの両方が含まれている場合、2つの地図が表示されます。上の地図にはグローバルポイントが表示され、下の地図にはローカルポイントが表示されます。任意のポイントをクリックすると、ラベル名が表示されます。グローバルポイントとローカルポイントを活用することで、サイト位置の特定を行うことができます。
リンクポイント
ポイント集合にローカル座標系とグローバル座標系のポイントが含まれているため、これらを連結する準備が整っています。3つ以上のポイントが連結されると、グローバル座標系とローカル座標系の間の変換を計算できるようになります。所定の精度範囲外に残差がある連結ポイントを削除できるようにするため、3つ以上の連結ポイントを使用することをお勧めします。
- コレクション内のグローバルおよびローカル参照を持つポイントを選択し、リンクをタップしてください
 ボタン。
ボタン。
- グローバルポイントが選択されている場合、ローカルポイントのリストが表示されます。適切なローカルポイントを選択して、グローバルポイントとリンクさせてください。
- ローカルポイントを選択すると、グローバルポイントの一覧が表示されます。適切なグローバルポイントを選択して、ローカルポイントとリンクさせてください。
ポイントが連結されると、マップビュー上で連結されたポイントが緑色に変わります。連結ボタンは「連結解除」ボタンに置き換わります。
 ボタン。
ボタン。 - 3か所以上を連結してください。アラートが表示され、即座に計算が行われます。キャンセルして、さらにポイントを連結することも可能です。

計算サイトの位置特定
3つ以上の点を連結すれば、変換を計算することができます。外れ値がある場合は、3つ以上の点を連結することをお勧めします。追加の点を連結したら、変換を計算し、各点について算出された残差とRMSを確認してください。

 をタップして Calculate ボタン。
をタップして Calculate ボタン。
残高
各点について、東、北、および高度方向の残差が表示されます。これらの残差は、各点の基準局所座標と、全座標系から局所座標系への変換に基づいて算出された変換座標から計算されます。

外れ値を除去するには:
 トグルボタンをタップして、外れ値とみなされるデータを削除してください。
トグルボタンをタップして、外れ値とみなされるデータを削除してください。 すべての外れ値の表示をオフにした後、「再計算」をタップしてください。
すべての外れ値の表示をオフにした後、「再計算」をタップしてください。- 「確認」を選択してください。
許容誤差の設定を編集する:
残差の許容誤差をカスタマイズすることができます。
 設定ボタンをタップしてください。
設定ボタンをタップしてください。- 希望する許容誤差の設定を入力してください。(デフォルト値は、コレクションの測定単位で表示されます)

- 外れ値の値を入力してください。
- RMS誤差の値を入力してください。
- 「完了」をタップします。
RMS誤差の計算方法に関する詳細はこちら: タイ ポイント どのように定義されるか - RMS。
計算された位置特定オプションと出力
設置場所を慎重に選定すれば、いくつかの選択肢が考えられます。
WKTファイルをエクスポート
タップ  ローカライズされたプロジェクトをローカルで処理するために、サイトのローカライズ用WKTファイルをエクスポートして保存します。
ローカライズされたプロジェクトをローカルで処理するために、サイトのローカライズ用WKTファイルをエクスポートして保存します。
ドロップダウンメニューをタップしてください![]() 画面の右上隅をタップして、その他のオプションを表示してください。
画面の右上隅をタップして、その他のオプションを表示してください。

 サイトのローカライズを編集
サイトのローカライズを編集
計算後にコレクションを編集することができます。この操作を行うと、以前の変換定義は消去されます。コレクションは計算前の状態に戻ります。追加の点は、以前と同様に測定、インポート、リンク、およびリンク解除を行うことができます。
 ローカライズされたファイルをエクスポート
ローカライズされたファイルをエクスポート
グローバルポイントとローカルポイントを含むZIPファイルを、2つの別々の.csvファイルとしてエクスポートし、.wkt拡張子を持つ変換ファイルも一緒にエクスポートしてください。
 結果を見る
結果を見る
サイト位置特定の結果の概要:
- RMS誤差。
- 点および軸ごとの残差。
RMS誤差の計算方法に関する詳細はこちら: タイ ポイント どのように定義されるか - RMS。
サイト固有のプロジェクトを処理する
計算されたサイト位置情報のデータセットがあれば、それを用いてプロジェクトを処理することができます。プロジェクトはPIX4Dcloud Pix4Dcloud アップロードして処理するか、エクスポートしてPIX4Dmaticで処理することができます。
ローカライズされたプロジェクトをPIX4Dcloud /PIX4Dcloud にアップロードして処理します。
PIX4Dcatch位置情報の収集データを適切に設定しておけば、PIX4Dcloud /PIX4Dcloud にアップロードする際に、そのデータを処理対象として選択することができます。

PIX4Dcloud /PIX4Dcloud にアップロードする際、サイトの位置情報ポイントのコレクションをプロジェクトに割り当てるには:
 をタップして サイトのローカライズ arrow
をタップして サイトのローカライズ arrow .
.- 適切なサイトのローカライズポイントのコレクションを選択してください。

- Tap Upload.
詳細はこちら: PIX4Dcloudで現場測量プロジェクトを可視化する方法
PIX4Dmatic /PIX4Dmatic を使用してローカルで処理する
エクスポートされたプロジェクトと「point_collection_name.wkt」ファイルがあれば、サイト固有の設定が適用されたプロジェクトをPIX4Dmaticにインポートして処理する準備が整います。
- モバイルデバイスからプロジェクトをエクスポートします。このエクスポートには画像ファイルが含まれます(LiDAR対応のAppleデバイスからは、DepthMap.tiffおよびConfidence.tiffファイルも含まれます)。
- ドロップダウンメニューをタップしてください。
- タップ すべてのデータをエクスポートする.
- Export and save.
For more information: How to export PIX4Dcatch projects (iOS/Android).
- ドロップダウンメニューをタップしてください。
- タップ 「point_collection_name.wkt」ファイルをエクスポートして保存します。

- PIX4Dmaticを開きます。
- 新しいプロジェクトを作成し、画像ファイルやフォルダを取り込みます。

- WKTファイルをインポートします。

- をタップして
 in the
in the  「タイポイント」タブ
「タイポイント」タブ - 選択 CRSファイルをインポートする .
- インポートするサイト固有の point_collection_name.wkt ファイルを選択してください。
- タップ

- をタップして
- 校正する。
WKTファイルのインポートが正常に完了すると、PIX4Dmatic 、ローカライズされたポイントコレクション名がプロジェクトの ![]() PIX4Dmatic の左下隅にある座標系。プロジェクトのサイトローカライズは正常に完了しており、必要に応じて処理を行うことができます。
PIX4Dmatic の左下隅にある座標系。プロジェクトのサイトローカライズは正常に完了しており、必要に応じて処理を行うことができます。
詳細については: PIX4DmaticでのPIX4Dcatch 処理方法。