PIX4Dmapper 画像間で数千もの共通点を自動検出する画像PIX4Dmapper 。画像内で検出される特徴点はキーポイントと呼ばれます。 異なる画像内の2つのキーポイントが同一と 判定されると、それらはペアリングされたキーポイントとなります。正しくペアリングされたキーポイントのグループごとに、1つの3Dポイントが生成されます。2つの画像間で高いオーバーラップが存在する場合、捕捉される共通領域が広くなり、より多くのキーポイントをペアリングできます。キーポイントが多いほど、3Dポイントの計算精度が高まります。したがって、画像間で高いオーバーラップを維持することが基本原則です。
画像取得計画は結果の品質に大きな影響を与えるため、綿密に設計することが重要である。
高速/低解像度処理で良好な結果が得られない場合、データセットが適切でない可能性が高く、画像の再取得が必要となる。場合によっては、高速/低解像度 オプションが失敗し 、完全処理によって モデルの再構築が成功することもある。
詳細情報については、 迅速/簡易解決と 完全処理の差異について: 完全処理 vs. 迅速/簡易解決。
理想的な画像取得計画
理想的な画像取得計画は、再構築対象となる地形/物体の種類によって異なります:
- 一般的なケース:森林、雪、湖、農地、および/または再構築が困難なその他の地形を含まないプロジェクト向け。
- 森林および密生した植生:森林または密生した植生に覆われた区域を対象とするプロジェクト向け。
- 平坦な土地と農地:視覚的に均質な平坦な土地、例えば農地のような場合。
- 建物の再構築:建物の3Dモデリング用。
- 特殊なケース:雪、砂、水(海、湖、川など)の表面の場合。
- 回廊マッピング線形対象領域(道路、河川など)を伴うプロジェクト向け
- 複数フライト: 複数フライトで撮影された画像を用いたプロジェクト向け。
- 都市の再構築(見えるファサード):都市部の3Dモデリング用。
- 3D室内再構築:建物の内部空間を3Dモデリングするため。
- 複合再構築:複合データセット(屋内/屋外、航空/地上、および/または垂直/斜め)向け。
- 大型垂直物体の再構築:送電塔、風力タービンなどの物体の3Dモデリング向け
- トンネル再構築:トンネルの3Dモデリング用。
- 小型オブジェクト:小型オブジェクトの3Dモデリング用。
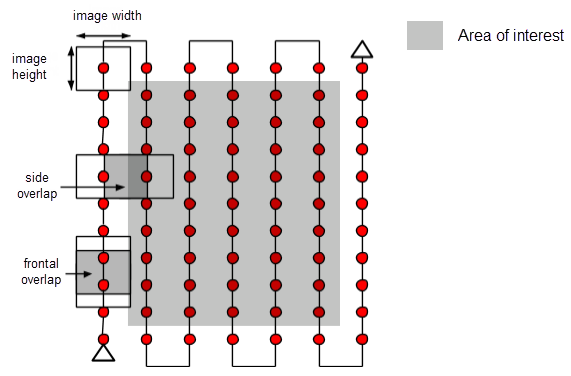
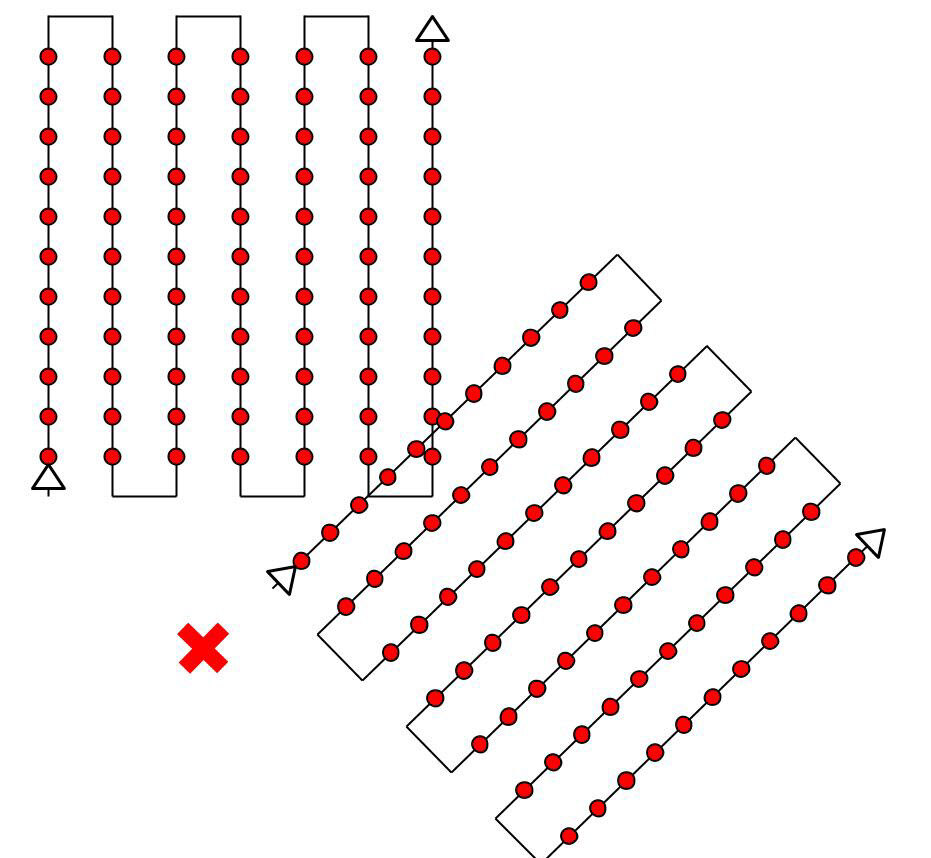
ほとんどのケースで推奨されるオーバーラップは、 少なくとも75%の前方オーバーラップ(飛行方向に対して)および 少なくとも60%の横方向オーバーラップ( 飛行経路間)です。規則的なグリッドパターンで画像を取得することが推奨されます(図1)。 カメラは、望ましい地上像素サイズ(GSD)を確保するため、可能な限り 地形/対象物に対して一定の高さを維持する必要があります。
木々や密生した植生は、複雑な幾何学的構造(無数の枝や葉)のため、重ね合わせた画像間で外観が大きく異なることが頻繁に発生します。したがって、画像間で共通する特徴点(キーポイント)を抽出することは困難です。良好な結果を得るためには、一般ケースのセクションで説明されているような格子状の画像取得計画を採用し、以下の変更を加えることを推奨します:
- 画像間のオーバーラップを、前面オーバーラップは少なくとも85%、側面オーバーラップは最低70%に増やす。
- 飛行高度を上げる:高度が高くなるほど遠近法の歪みが少なくなり(外観上の問題が軽減される)、密生した植生の視覚的特性が向上する。 言い換えれば、重なり合う画像間の視覚的類似性をこれらの領域で検出することが容易になる。飛行高度は画像の画素解像度および焦点距離と組み合わさり、画像の地上像素サイズ(空間分解能)を決定する。地上像素サイズ(GSD)が10cm/pixelを超える場合、より優れた結果が得られる。
密生した植生エリアの処理結果を改善する方法に関する詳細情報:密生した植生エリアにおける出力ファイルの品質向上方法
平坦な地形や農業用地のように視覚的に均質な環境では、画像間で共通の特徴点(キーポイント)を抽出することが困難です。良好な結果を得るためには、一般ケースのセクションで説明されているグリッド状の画像取得計画を採用し、以下の変更を適用することを推奨します:
- 画像間のオーバーラップを 、前面オーバーラップで少なくとも85%、側面オーバーラップで最低70%に増やす 。
- より高い高度を飛行する。ほとんどの場合、より高い高度を飛行することで結果が向上する。
- 画像の正確な 位置情報を 取得し、農業テンプレートを使用します。 農業テンプレート(Ag)の詳細については、処理オプションのデフォルトテンプレートを参照してください。
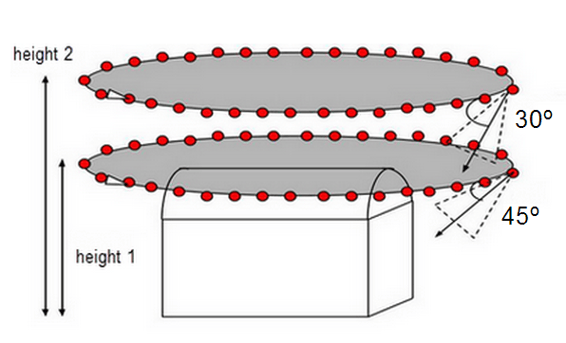
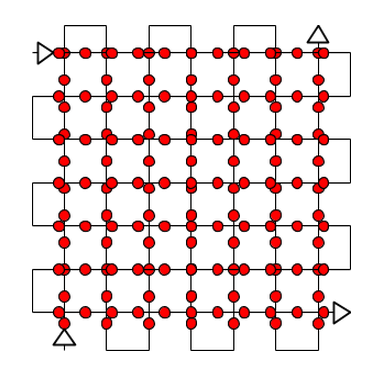
3D建物再構築には、特定の画像取得計画が必要である(図2):
- カメラを45度の角度で設定し、建物周囲を初めて飛行してください。
- 建物の周囲を二度、三度と周回飛行し、各周回ごとに飛行高度を上げ、カメラの角度を下げた。
- 対象物のサイズと距離に応じて、十分なオーバーラップを確保するため、5~10度ごとに画像を撮影することを推奨します。距離が短く対象物が大きい場合は、より短い間隔で画像を撮影する必要があります。
- 飛行高度は、異なる高度が異なる空間分解能をもたらすため、フライト間で2倍以上増加させてはなりません。詳細については: PIX4Dmapper 異なる飛行高度で撮影された画像をPIX4Dmapper ?
- PIX4Dmapper 、建物の斜め画像に対して高品質な点群をPIX4Dmapper 。ただし、選択したテンプレートが「3Dモデル:処理オプションの既定テンプレート」の場合、オルソモザイクは生成されません。
画像には、各データセット内およびデータセット間で十分なオーバーラップが必要です。そのような場合には、異なる画像セットを適切に調整するために、GCP(地上制御点)または手動接続点を使用することが強く推奨されます。
このセクションでは、雪や砂、湖など、マッピングが難しい地形に関するいくつかの提案を提供します。
雪と砂は、広大な均一な領域のため視覚的要素が少ない。したがって:
- 十分な重ね合わせを使用してください:少なくとも前面の重ね合わせは85%、側面の重ね合わせは70%以上。
- 露出設定を適切に調整し、各画像で可能な限り高いコントラストを得てください。
水面は広大な均一な領域のため、視覚的な情報がほとんどない。水面の太陽の反射や波紋は視覚的なマッチングに利用できない。
- 海は 再構築することが不可能である 。
- 河川や湖などの他の水域を再構築するには、各画像に陸地の特徴が含まれている必要があります。高度を上げることで、より多くの陸地の特徴を画像に含めることができます。
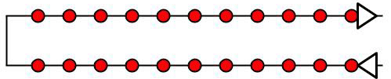
鉄道、道路、河川などの回廊をマッピングするには、少なくとも2本のフライトラインが必要です(図3)。地上制御点(GCP)は必須ではありませんが、地理参照精度と再構築精度向上のために推奨されます。回廊マッピングにおけるGCPの数と配置に関する詳細は「回廊マッピングにおける地上制御点(GCP)の数と配置」を参照してください。
二重の軌道については、少なくとも85%の前方オーバーラップと少なくとも60%の側方オーバーラップの使用が推奨されます。
垂直画像または斜め画像(0°(垂直)から45°までの角度で、両方の軌道が回廊の中心を指すように)を使用することが可能です。平坦な地形の場合、垂直画像の使用が推奨されます。
二重軌道画像取得計画が不可能な場合、単一経路画像取得計画を使用できます(図4)。
- 前立ての高さが不十分です:前立ての高さは少なくとも85%以上である必要があります。
- 支持点(GCP)は飛行経路に沿ってジグザグに定義される。
PIX4Dmapper 複数のフライトで撮影された画像をPIX4Dmapper 。異なる画像取得計画を設計する際には、以下の点に注意してください:
- 各計画は十分な重なりをもって画像を捕捉する。
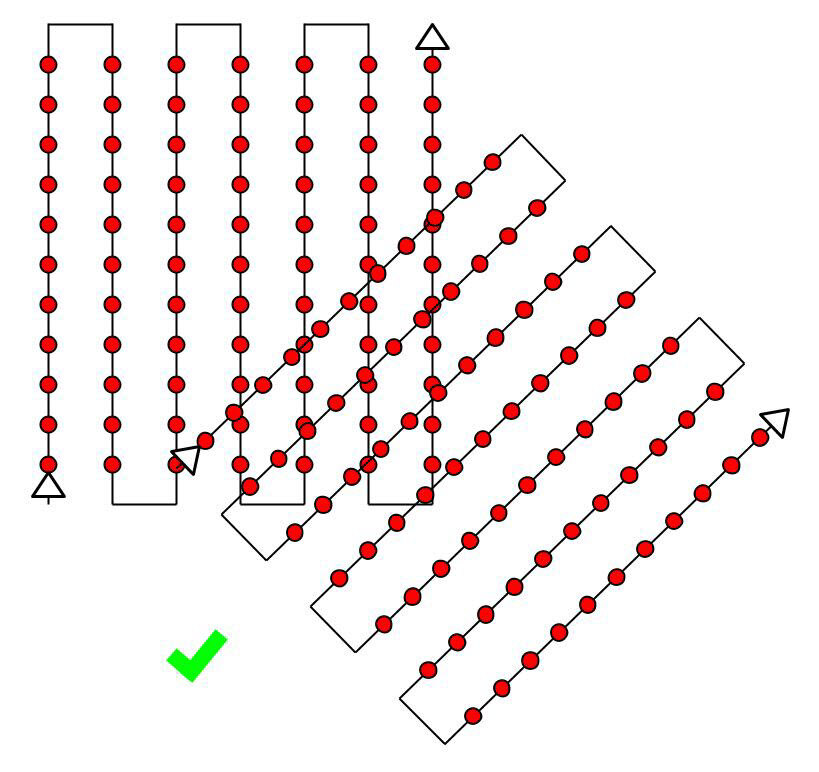
- 2つの画像取得平面間に十分な重なりがある(図5)。
- 異なる平面図は可能な限り同じ条件(太陽の方向、気象条件、新たな建物の建設がないことなど)で撮影される。
複数のフライトで取得したデータセットを処理する特別な方法があります。手順に従って進めてください:大規模データセットの処理。
都市部の3D再構築には、建物の全ファサード(北、西、南、東)が画像に映るよう、二重グリッドの画像取得計画が必要です。オーバーラップは一般ケースと同様に設定してください。
ファサードを可視化するためには、画像を10°から35°の 角度で撮影する必要があります( 0°はカメラが真下を向いている状態)。詳細な描写が必要な場合は、航空写真と地上写真を組み合わせる必要があります。
画像には、各データセット内およびデータセット間で十分なオーバーラップが必要です。そのような場合には、異なる画像セットを適切に調整するために、GCP(地上制御点)または手動接続点を使用することが強く推奨されます。
屋内再構築には地上画像の使用が推奨されます。高いオーバーラップ率(90%)が必要です。したがって、魚眼レンズを搭載したカメラの使用が推奨されます。
手動接続点は再構築を改善し、モデルの適切な調整を支援します。詳細情報:ウェビナー。
屋内/屋外、空中/地上、および/または垂直/斜め方向の組み合わせが可能です。あらゆる組み合わせが可能です。
画像データセット内およびデータセット間で十分なオーバーラップを確保する必要があります。このような場合、異なる画像セットを適切に調整するために、GCP(地上制御点)または手動接続点の活用を強く推奨します。詳細情報:ウェビナー
送電塔や風力タービンなどの物体の3D再構築には、特定の画像取得計画が必要である(図8):
- 構造物への接近飛行。
- 構造物の周囲を異なる高度で数回飛行してください。
- 画像は高いオーバーラップ率で撮影する必要があります:同じ高さで撮影される画像間では90%のオーバーラップ率、異なる高さで撮影される画像間では60%のオーバーラップ率が必要です。
- 上部の円に対してカメラの最適な角度は45度です。地面を向けることで、画像の内容を揃えやすくなり、より良い結果が得られます。
- 画像は可能な限りピントを合わせる必要があります(主被写体と背景の両方にピントを合わせる)。
- 地理位置情報付きの画像を撮影できるドローンの使用が推奨されます。
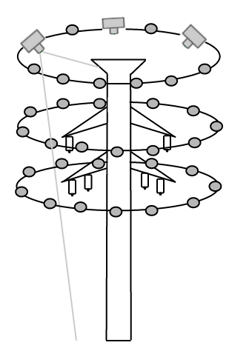
電力鉄塔
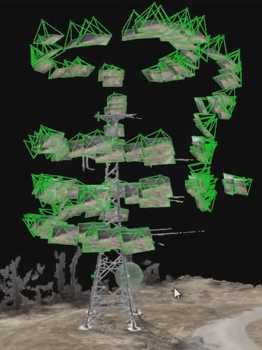
rayCloudで再構築された電力タワー
PIX4Dmapper トンネルの再構築PIX4Dmapper 。トンネル再構築における最大の課題は照明条件です。照明が良好であれば、自然光(トンネルが長すぎない場合)または人工照明のいずれにおいても、再構築の精度は非常に高くなる可能性があります。
暗いトンネルの場合は三脚の使用をお勧めします。
- 魚眼レンズ付きカメラを使用する。
- 複数のラインで画像を取得する(単一経路での取得を避ける)。複数の経路による取得計画が立てられない場合、単一経路でも機能する可能性がある。この場合、地上制御点(GCP)の使用を強く推奨する。

図9. トンネルの自動接続ポイント。