viDoc RTKローバーを正しく装着し、端末と接続が完了できしだい、撮影を開始することができます。
プロジェクトの精度を高めるために、理想的な撮影方法とデータセットの取得を目指しましょう。
PIX4Dcatch にviDoc RTK ローバーが接続されたら、RTKが固定されるまで待機します。アンテナが邪魔にならないようにし、インターネット接続を良好に保つようにしてください。
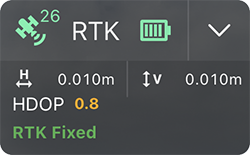
HDOP (水平精度拡散)および VDOP (垂直精度拡散) に、現在の位置精度の品質と衛星分布が表示されます。
一般的に理想的なHDOP値は1未満とされています。高い精度を得るには、0.65未満の値を保持して撮影を行ってください。
一般的に理想的なVDOP値は1未満とされています。高い精度を得るには、1未満の値を保持して撮影を行ってください。
精度の値は以下の要因により変動します
- GNSS信号が周囲の建物や木・橋によって遮断されている もしくは 反射している
- 端末の急な移動
- 通信状況の不良
詳しくはこちら
参考記事
viDoc RTK ローバーを使ったPIX4Dcatchプロジェクトのアップロード・エクスポート
PIX4Dcatchプロジェクトのエクスポート(iOS・Android端末対応)
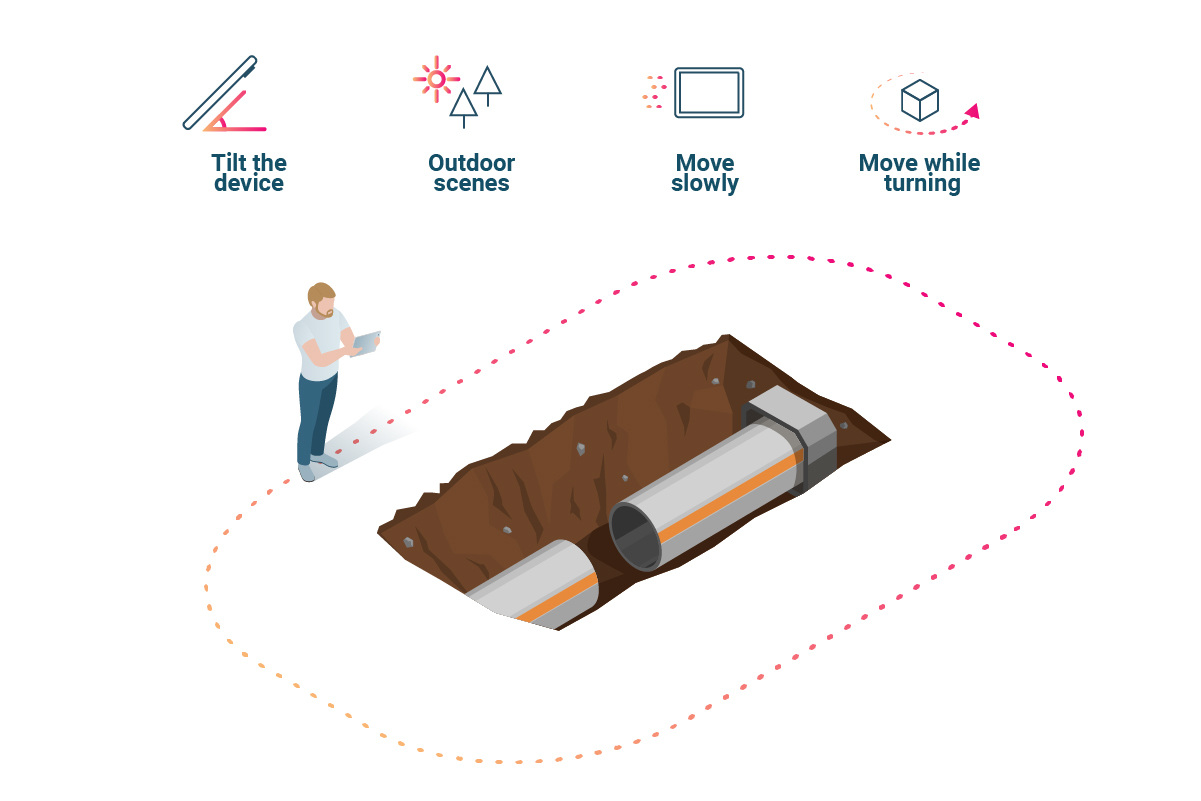
最良の結果を得るには、キャプチャルートを計画することをお勧めします。 最適な方向性を見定めます。 被写体やサイズに応じて、円形または直線的なキャプチャパスを使用することができます。 大きな被写体では、複数の平行なパス(水平または垂直)を使用し、パス間のオーバーラップを適切にすることが考えられます。
1. 録画ボタンをタップします ![]() デバイスをゆっくり動かしてキャプチャを開始します。 選択した設定に基づいて、アプリが自動的に画像のキャプチャを開始します。
デバイスをゆっくり動かしてキャプチャを開始します。 選択した設定に基づいて、アプリが自動的に画像のキャプチャを開始します。
2. 必要に応じて、 一時停止ボタン ![]() をタップして、録音を一時停止します。 録画ボタン
をタップして、録音を一時停止します。 録画ボタン ![]() をタップすると、録音を再開します。
をタップすると、録音を再開します。
デバイスに LiDAR または ToF センサーを搭載している iOS および Android ユーザーは、 ライブ プレビュー機能を使用して、何がキャプチャされているかを把握できます。
3. キャプチャが完了したら、 ![]() をタップして、キャプチャしたプロジェクトを保存します。 キャンセルボタンは、
をタップして、キャプチャしたプロジェクトを保存します。 キャンセルボタンは、 キャプチャー中にプロジェクトを中断するときに使用します。
キャプチャー中にプロジェクトを中断するときに使用します。
![]() ボタンをタップすると、レビュー用のキャプチャレポートが表示されます。
ボタンをタップすると、レビュー用のキャプチャレポートが表示されます。

レポート上では、プロジェクトを保存する前に以下の情報を確認することができます。:
- プロジェクトの名前
- 画像枚数
 - キャプチャ時に撮影された画像の枚数
- キャプチャ時に撮影された画像の枚数  をタップするとプロジェクトの中心が表示されます。
をタップするとプロジェクトの中心が表示されます。 をタップすると:
をタップすると:
 カメラ位置の表示/非表示トグル
カメラ位置の表示/非表示トグル 低密度点群トグル。TOF/LiDARセンサーのついたデバイスでのみご利用いただけます。これらのないデバイス上では、タイポイントが表示されます。
低密度点群トグル。TOF/LiDARセンサーのついたデバイスでのみご利用いただけます。これらのないデバイス上では、タイポイントが表示されます。 メニューを閉じる
メニューを閉じる
プロジェクトが作成され、デバイスに保存されます。
- モデリングを作成したい被写体で画像フレームを埋めます。
- 少し下向きに傾けて使用します。
- カメラを向けて、近くと遠くをキャプチャします。
- 操作者の影を含め、動くものを避けてください。
- 良い照明の下で豊かなテクスチャをキャプチャします。
- ゆっくり移動して回ります。
- 静止中にカメラの向きを変えないでください(例:その場で回転する)。
- 急な視点変更、急な動作、手を振る動作は避けてください。
- カメラと写すものの距離を一定に保つようにしてください。
- コーナーでもスムーズな移動を心がけてください。
- 高い領域または低い領域をさらに詳細をキャプチャしようとする場合は、同じ高さからカメラの角度を上下に向けるよりも、カメラの高さを上げたり下げたりすることをお勧めします。
- 計画
- 現場のジオメトリにより視認性が制限される可能性があるエリアを特定します。
- 照明に配慮した画像取得を計画してください。
- マニュアルタイ ポイントと地上コントロール ポイントの候補地を検討し、 配置します。
- 困難な地形では、試し走行が有効です。
プロジェクトを保存すると、処理のためにアップロードするか、デバイスで新しいプロジェクトを開始する準備が整います。