PIX4Dcatchのサイトローカリゼーション機能は、ローカル座標系での作業や、ローカルとグローバルの座標参照系間での点の変換が可能です。既存のポイントをインポートしたり、新しいポイントを現地で測定することができます。ポイント取得は、PIX4DcatchとviDoc RTK rover、またはサードパーティ製デバイスから行うことができます。
本記事の内容
新規グループの作成
ローカルポイントの追加
ローカルポイントをインポート
ローカルポイントの定義
グローバルポイントの追加
グローバルポイントの測定
グローバルポイントのインポート
リンクポイント
サイトローカリゼーションの計算
残差
計算されたサイトローカリゼーションのオプションとアウトプット
WKT ファイルのエクスポート
サイトローカリゼーションの編集
ローカリゼーションファイルをエクスポート
結果を閲覧
サイトローカリゼーションプロジェクトの処理
PIX4Dcloud / PIX4Dcloud Advancedにプロジェクトをアップロード・処理
PIX4Dmaticでローカルに処理を行う
新規グループの作成
- メインスクリーンから、新しいポイントグループボタンをタップすると、ポイントマネジメントダイアログが表示されます。
- 新規グループボタン
 をタップして、点群の保存先となるグループを作成します。
をタップして、点群の保存先となるグループを作成します。
- サイトのローカリゼーションをタップします。
- グループの名前を入力して保存をタップします。
新しいグループが作成され、ポイントを取得する準備ができました。
サイトのローカライゼーションを行う場合、グローバルとローカルという2つの座標系が定義されています。グローバル座標系は、既知のパラメータを持つ定義された座標系を指し、グローバルポイントに使用されます。サイトローカライゼーションでは、地理的な座標参照系しか使用することができないため、測定値またはインポートされた点群は常に角度で表されます。ローカル座標参照系は、ユーザーによって定義されるカスタムシステムです。これは、任意の原点、方向、およびスケールを含んでいます。メートル、フィート、US測量フィートなどの既知の単位が定義されています。
グローバル座標系は、ポイントのインポートや計測を行う際に定義されます。
このステップでは、座標参照系は未定義とします。
ローカルポイントの追加
新しいポイントグループには、ポイントを追加することができます。ローカルポイントを最初に追加し、次にグローバルにポイントを測定してリンクする必要があります。新しいローカルポイントは、インポートするか、手動で追加することができます。グローバルポイントは、ローカルポイントにリンクする際に、viDoc RTK roverで測定することができます。ポイントが測定されると、ポイントグループ用に座標参照系が定義されます。

ローカルポイントは、.csvファイルでインポートするか、既知のローカル座標を手動で入力して定義することができます。
ローカルポイントをインポート
- 6 列: ポイント名, 東距, 北距, 高さ, 水平精度, 垂直精度
- 4 列: ポイント名, 東距, 北距, 高さ
- ポイントをインポートボタン
 を押す。
を押す。 
- 任意座標系 タブを選択します。
- 測定単位を選択します。
- メートル (m)
- 米国フィート (USft)
- 国際フィート (ft)

- 軸方向を選択します。
インポートされたポイントの軸の向きを選択します。
ファイル構造を表す方向、すなわち、どの列に東方位座標と北方位座標があるかを選択します。Tip: ヨーロッパ諸国では通常、東経と北緯の座標があり、北米では北緯の後に東経があります。
- インポートを選択します。
インポートされたポイントは、ポイントグループにリストアップされます。

新しくインポートされたローカルポイントには、全て以下のものを含みます。:
- ポイント名。
- インポートタグとローカルタグ。
- 水平精度と鉛直精度(ファイルに含まれている場合)。
- 座標と測定単位。
- インポート日
- リンクアイコン - コレクションにグローバルポイントがない場合、このアイコンはグレーアウトされます。
- 測定アイコン - viDoc RTK roverでポイントを測定します。
ローカルポイントがインポートされると、グローバルポイントが追加できるようになります。
ローカルポイントの定義
ローカル座標を含む.csvまたは.txtがない場合、既知のローカル座標を手動で入力し、ポイントグループにローカルポイントを追加することが可能です。
- ポイントグループにおいて、 新しいポイントボタン
 をタップします。
をタップします。 
- ローカルポジションタブを選択します。
- 以下を入力してください:
- ローカルポジション名 (任意)
- 座標の東距、北距、高さ(楕円体)
- 水平精度 と 鉛直精度 (任意)
- ローカル座標を保存
 をタップ。
をタップ。 - 測定単位を選択します。 (この選択は、最初に入力されたポイントに対して有効で、グループに入力された次のポイントの測定単位を定義します。)
- ローカルポジションが入力されました。
ローカルポイントがポイントグループに追加されると、グローバルポイントの追加・リンクができるようになります。
グローバルポイントの追加
ポイントグループにローカルポイントがあれば、viDoc RTKローバーでグローバルポイントを測定したり、.csvや.txtファイルからインポートしてローカルポイントをグローバルリファレンスにリンクさせることが可能です。変換は、両方の座標系で最低3つの既知のポイントがあれば、ローカルポイントとグローバルポイント間で計算することができます。可能な限り、適切な分布と間隔でより多くのポイントを測定することをお勧めします。
グループのグローバル座標参照系は、最初にインポートまたは測定されたグローバルポイントによって定義されます。それ以降のすべての測定は、この基準で行う必要があります。
グローバルポイントの測定
- ポイントグループから、グローバルに測定するローカルポイントを選択して、計測アイコンをタップします


- グローバルポイントタブ(デフォルト)を選択します。

- 以下を入力してください:
- グローバルポイント名
- アンテナ高 / 高度補正 (任意) レーザーなしで計測をする際に入力
- 参考画像 (任意)
- 詳細(任意)
- 計測時間 >30 seconds is recommended
- 計測
 をタップ。
をタップ。
測定されると、その点はグローバルおよびローカルな座標系にリンクされます。最低3つのリンクポイントがあれば、計算を実行することができます。
グローバルポイントのインポート
ローカルポイントをインポートする同じ方法で、グローバルポイントをインポートすることができます。
- 6 列: ポイント名, 東距, 北距, 高さ, 水平精度, 垂直精度
- 4 列: ポイント名, 東距, 北距, 高さ
ポイントグループから、
- ドロップダウンメニュー
 を選択し、インポートファイルアイコン
を選択し、インポートファイルアイコン をタップします。
をタップします。 
- グローバルポイントを含む .csv または .txt ファイルを選択します。

- 既知の座標系 タブを選択します。
- インポートするポイントの座標系を選択します。
- 軸の方向を選択します。
インポートされたポイントの軸の向きを選択します。ファイル構造を表す方向を選択してください。(Easting座標とNorthing座標がある列などをご確認ください。)
- インポートをタップ
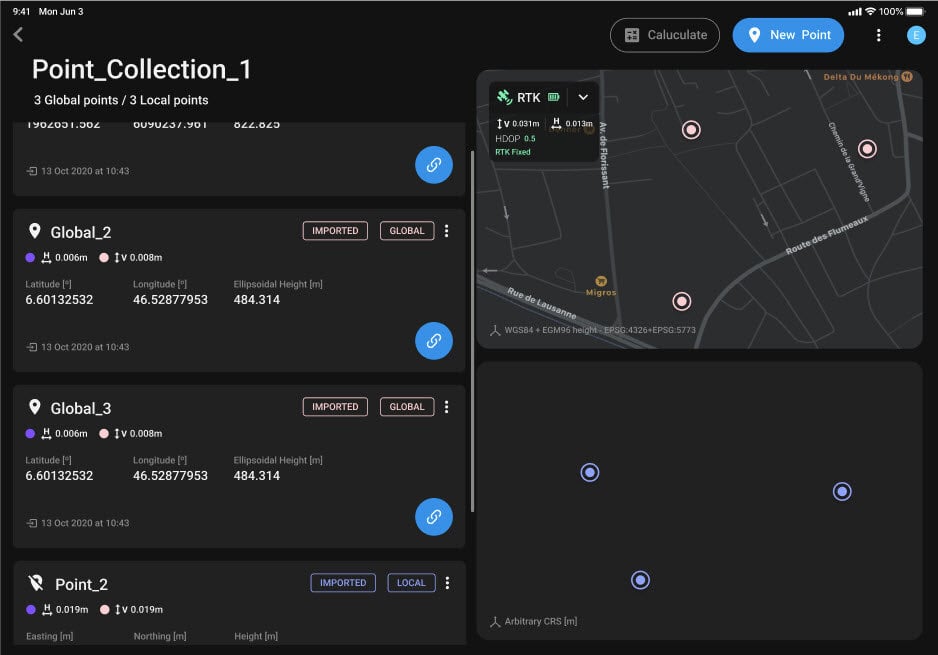
グローバルポイントは、それぞれのタグを付けてポイントグループに保存され、地図上に表示されます。サイトローカライズポイントグループにグローバルポイントとローカルポイントがある場合、2つのマップが表示されます。上のマップにはグローバルポイントが表示され、下のマップにはローカルポイントが表示されます。任意のポイントをクリックすると、ラベル名が表示されます。 グローバルポイントとローカルポイントが揃ったので、これらをリンクしてサイトローカライゼーションを計算することができます。
リンクポイント
ポイントグループにローカルポイントとグローバルポイントがあれば、リンクする準備は完了です。3点以上リンクされると、グローバル座標系とローカル座標系の間の変換を計算することができるようになります。3点以上リンクさせると、残差のあるリンクされた点を希望の精度から外すことができるため、3点以上リンクさせることをお勧めします。
- グループの中から、グローバルとローカルの座標系のあるポイントを選択し、リンクボタン
 をタップします。
をタップします。
- グローバルポイントが選択されている場合、ローカルポイントのリストが表示されます。正しいローカルポイントを選択して、グローバルポイントにリンクさせます。
- ローカルポイントを選択すると、グローバルポイントのリストが表示されます。正しいグローバルポイントを選択し、ローカルポイントとリンクさせます。
リンクがされたポイントはマップ上に緑色で表示されます。リンクボタンはリンク解除ボタン
 に切り替わります。
に切り替わります。 - 3点以上リンクさせて下さい。アラートが表示され、すぐに計算することができます。より多くのポイントをリンクさせたい場合は、キャンセルすることもできます。

サイトローカリゼーションの計算
3点以上のリンクがあれば、変換結果を計算することが可能です。
異常値がある場合は、3点以上リンクさせることをお勧めします。追加のポイントがリンクされたら、変換を計算し、その結果得られた残差とポイントについて計算されたRMSをチェックします。

-
 計算 ボタンをタップします。
計算 ボタンをタップします。
残差
各ポイントについて、East、North、Heightの残差値が表示されます。残差は、点の基準ローカル座標と、グローバル座標からローカル座標への変換に従った変換座標から計算されます。

誤差を取り除くには:
-
 トグルボタンをタップして、誤差と思われるポイントを削除してください。
トグルボタンをタップして、誤差と思われるポイントを削除してください。 - 誤差と思われるポイントを削除したうえで、
 再計算をタップしてください。
再計算をタップしてください。 - 確認するを押してください。
許容差の設定を編集するには:
残差の許容範囲をカスタマイズすることができます。
-
 設定ボタンをタップしてください。
設定ボタンをタップしてください。 - 任意の許容設定を入力ください。(デフォルト値はポイントグループ単位で表示されます)。

- ポイント外れ値を入力してください。
- 平均二乗誤差平方根の値を入力してください。
- 完了をタップしてください。
計算されたサイトローカリゼーションのオプションとアウトプット
計算されたサイトのローカリゼーションでは、いくつかのオプションが利用可能です。
WKT ファイルのエクスポート
WKTファイルのエクスポート をタップして、サイトローカリゼーションをWKTファイルにエクスポート・保存して、ローカルプロジェクトで処理することができます。
をタップして、サイトローカリゼーションをWKTファイルにエクスポート・保存して、ローカルプロジェクトで処理することができます。
右上のドロップダウンメニュー![]() をタップして、オプションを表示します。
をタップして、オプションを表示します。

 サイトローカリゼーションの編集
サイトローカリゼーションの編集
計算後にグループを編集することが可能です。この操作で、前の変換定義は消去されます。グループは、計算する前の状態に戻る。追加のポイントは、以前と同様に測定、インポート、リンク、およびアンリンクすることができます。
 ローカリゼーションファイルをエクスポート
ローカリゼーションファイルをエクスポート
グローバルポイントとローカルポイントを2つの別々の.csvファイルに収めたZIPファイルと、拡張子.wktの変換ファイルをエクスポートすることができます。
 結果を閲覧
結果を閲覧
サイトローカリゼーション結果のサマリーには以下が含まれます:
- 平均二乗誤差平方根
- ポイントと軸ごとの残差
サイトローカリゼーションプロジェクトの処理
計算されたサイトローカライズポイントの収集で、それを使ってプロジェクトを処理することが可能です。プロジェクトは、PIX4Dcloud / Pix4Dcloud Advancedでアップロードして処理するか、PIX4Dmaticでエクスポートして処理することができます。
PIX4Dcloud / PIX4Dcloud Advancedにプロジェクトをアップロード・処理
PIX4Dcatchで算出したサイトローカライズグループを、PIX4Dcloud / PIX4Dcloud Advancedへのアップロード時に処理対象として選択することができます。

PIX4Dcloud / PIX4Dcloud Advancedにアップロードする際に、プロジェクトにサイトローカライズポイントコレクションを割り当てるには:
- サイトローカリゼーション
 の矢印
の矢印 をタップしてください
をタップしてください - サイトローカリゼーションポイントグループを選択してください。

- アップロードをタップ。
PIX4Dmaticでローカルに処理を行う
エクスポートされたプロジェクトと、(ポイントグループ名).wktファイル、サイトローカライズされたプロジェクトは、PIX4Dmaticでインポートして処理することができます。
- モバイルデバイスからプロジェクトをエクスポートします。このエクスポートには、画像ファイルが含まれます。(さらにLiDAR対応のAppleデバイスからはDepthMap.tiffとConfidence.tiffのファイルが含まれます)
- ドロップダウンメニューをタップ
- 全てのデータをエクスポート をタップ
- エクスポートをして、保存する。
- ドロップダウンメニューをタップ
- WKTファイルをエクスポート をタップして、(ポイントグループ名).wktファイルをエクスポートして保存してください。

- PIX4Dmatic.
 を開きます。
を開きます。 - プロジェクトを作成し、画像フォルダ・ファイルをインポートします。

- WKTファイルのインポート

-
 タイポイントタブにある、
タイポイントタブにある、 アイコンをタップします。
アイコンをタップします。 - CRSファイルのインポートをタップします。
- インポートするWKTファイルを選択します。
- 適用
 をタップします。
をタップします。
-
- キャリブレーションが開始します。
WKTファイルが正常にインポートされると、PIX4Dmaticのウィンドウ左下に、ローカライズされたポイントコレクション名がプロジェクトの座標参照系![]() として表示されるようになります。プロジェクトは正常にsite_localizedされ、必要に応じて処理することができます。
として表示されるようになります。プロジェクトは正常にsite_localizedされ、必要に応じて処理することができます。