PIX4Dcatch に viDoc RTK ローバーを装着して使用する場合、RTKダイアログに現在の強度、接続されている衛星の数、およびRTK接続の予想精度が表示されます。受信と精度が変動するような場合に適切に調整し、よりよい撮影状況のもとデータの取得ができるよう、ダイアログの表示内容を理解しましょう。
本記事の内容
内蔵GPSセンサー

- GPSステータス
通信状態を常時モニタリング-
 4本のバー:位置の精度 5m未満(16ft)
4本のバー:位置の精度 5m未満(16ft) -
 3本のバー:位置の精度 5m(16ft)から10m(33ft)
3本のバー:位置の精度 5m(16ft)から10m(33ft) -
 2本のバー:位置の精度 10m(33ft)から50m(164ft)
2本のバー:位置の精度 10m(33ft)から50m(164ft) -
 1本のバー:位置の精度 50m(164ft)以上
1本のバー:位置の精度 50m(164ft)以上 -
 バーなし:GPS信号なし
バーなし:GPS信号なし
-
-
 GPS センサー または Bluetooth
GPS センサー または Bluetooth
- 内蔵GPSセンサー:内部GPSを使用 (デフォルト)
- Bluetooth経由でviDoc RTKに接続:viDoc RTK ローバーを装着する場合に選択
viDoc RTKのBluetooth接続状態
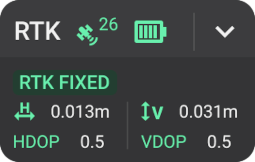
viDoc RTK ローバーがPIX4Dcatchに正常に接続されると、RTKダイアログが表示されます。この画面で接続状況と位置情報の精度を確認してください。
ヘッダー
- RTK接続アイコン、衛星接続数、バッテリーレベル、およびRTK接続ダイアログを表示
-
 RTKの接続状態を表す。緑色が正常な接続が確立された状態
RTKの接続状態を表す。緑色が正常な接続が確立された状態 - 26 RTK接続した衛星の数。リアルタイムで数値が変動
-
 バッテリー残量
バッテリー残量 -
 ドロップダウンメニューからRTK接続ダイアログを開く
ドロップダウンメニューからRTK接続ダイアログを開く
-
- RTKの鉛直および水平方向の推定精度
- viDoc RTK ローバーが取得できる位置データの推定精度の値を表示。測定単位はモバイル端末の地域設定から自動的に選択
- viDoc RTK ローバーが取得できる位置データの推定精度の値を表示。測定単位はモバイル端末の地域設定から自動的に選択
- HDOPおよびVDOP(水平/鉛直精度拡散)
- 現在の位置情報の品質と衛星の分布を表示。一般的に理想的なHDOP値は1未満、VDOP値は1.5未満とされる
- 現在の位置情報の品質と衛星の分布を表示。一般的に理想的なHDOP値は1未満、VDOP値は1.5未満とされる
- NTRIP RTK ステータス
- RTK NTRIP 接続状態を表示
- RTK Fixed: 精度の範囲は数cm (in)
- RTK Float: 精度の範囲は1m (3ft)
- DGNSSのみ: 精度の範囲は最大10m (32ft)
- スタンドアロンGNSS Fix: 10m(32ft)を超える精度の範囲
- Fixなし: 十分な衛星に接続できない、またはインターネット接続に問題がありデータの取得ができない
- RTK NTRIP 接続状態を表示
精度
現在の接続状況から予想される精度を表示します
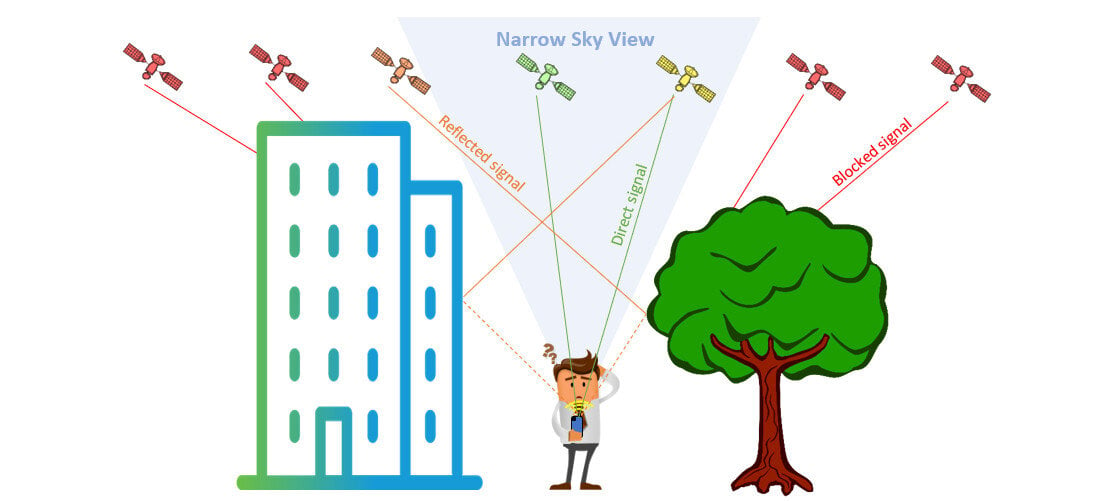
- 建物、木、橋などが近くにあるため、GNSS信号がブロックされる・反射している状態
- 端末が急に移動
- 携帯キャリアからのデータ受信状況
- アンテナが直立に保たれていないため、データ受信が最適な状態ではない
RTK fixが正常に確立された場合、水平精度および垂直精度は数センチメートルの範囲内となり、理想的な条件では、0.01m (0.03ft) に近い精度を得ることが可能です
ステータス
viDoc RTK rover がPIX4Dcatchに正常に接続され、RTK fixが表示されるまで待ってください。あわせて、アンテナを遮る物体が無いこと、インターネット接続が良好であることを確認してください。
RTK接続中、ステータス・HDOPおよびVDOPを確認して通信状況を確認します。接続可能な衛星数の変動により、通信品質ステータスが変わります。RTK Fix のステータスが維持できなくなったら、ゆっくりと、上部の障害物を避け、RTK Fix の表示が戻る場所まで移動してください。再度 RTK Fix が確立できると、データ量が増減した場合もPIX4Dcatchで対応が可能です。
(品質低→高)
端末と基準局 (マウントポイント) の両方が接続できている衛星の数が十分でない、または衛星の反射信号を受信している。位置の精度は1mの範囲内
HDOPおよびVDOP
HDOP (水平精度拡散)および VDOP (垂直精度拡散) に、現在の位置精度の品質と衛星分布が表示されます。
一般的に理想的なHDOP値は1未満とされています。高い精度を得るには、0.65未満の値を保持して撮影を行ってください。
一般的に理想的なVDOP値は1未満とされています。高い精度を得るには、1未満の値を保持して撮影を行ってください。
ベストプラクティス
地上撮影のベストプラクティス:
- 障害物が無く、上部が開けた場所に移動
- 良好なインターネット接続
- NTRIPの設定で、現在地から一番近い基地局 (マウントポイント) を選択
- RTK Fixが表示されてから測定を開始
- 測定中も精度の値に注意する。精度が低下した場合は、精度が上昇するまで静止する
- 測定はゆっくり、着実に行う
- アンテナを直立に保つ
注意事項:
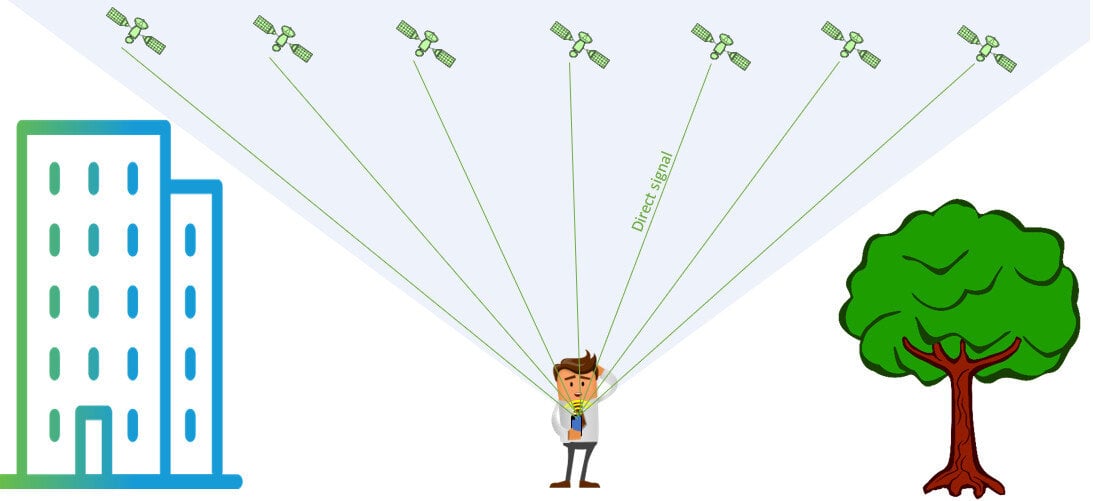
- 衛星からの電波を直接受信できるよう、建物や樹木の近くや橋の下など上空に障害物がある場所での撮影を避ける
- デバイスを急に動かさない
用語の解説
- Global Navigation Satellite System(GNSS)とは、GNSS受信機に衛星の位置や信号送信時刻のデータを送信する人工衛星群。位置の特定に用いられる
- Real-Time Kinematic (RTK) は、基準点からリアルタイムで補正情報を受信するための技術で、スタンドアロンGNSS受信機の精度が向上する
- RTK レシーバーは以下の2種類がある
- 静止受信機:国家基準点ネットワーク(CORS)などの ベースステーション (マウントポイント)
- 移動受信機:viDoc RTK ローバーに代表されるローバー
- 基地局とローバー間の通信は、NTRIPサービスを使用して行われる
- NTRIPサービスは、インターネット接続を介して基地局から補正情報を受信