IN THIS ARTICLE
Rig relatives calibration tool
What are rig relatives
How are rig relatives determined
When to use rig relatives calibration
Camera specific notes More information
Rig relatives calibration tool
To enable rig relatives calibration for applicable datasets:
1. Open a project and import images as usual.
2. Click the settings cog icon to the left of the Start processing button.
3. A pop-up appears, toggle on Rig relatives calibration.
4. Close the pop-up box.
5. Click Start processing to run the image processing.
What are rig relatives?
A rig is a camera with multiple sensors or lenses, such as the Parrot Sequoia or the MicaSense RedEdge. Each sensor or lense produces one or more images in a different band. The individual lenses in each camera are typically oriented in a slightly different direction. To be able to generate stitched images for each band that are aligned with respect to each other, the relative orientation between the lenses must be known. These relative orientations are the rig relatives.
How are rig relatives determined?
The rig relatives should be provided by the camera manufacturer and stored in the Exif data of each image. PIX4Dfields looks for this information and uses it by default if provided.
If the rig relative information is not provided in the Exif data, PIX4Dfields by default performs a software-based rig relative calibration to obtain the rig relatives (available since PIX4Dfields 1.4). This can be disabled by the user.
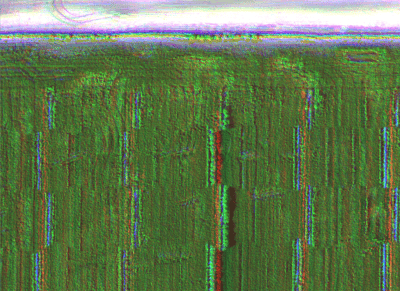
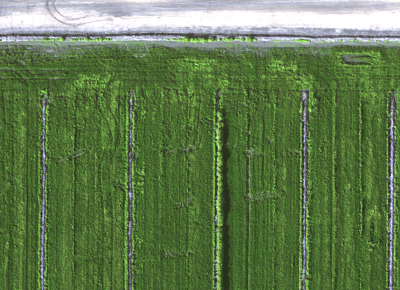
When to use rig relatives calibration?
If a processed dataset in PIX4Dfields has misalignment of the bands, it could be caused by wrong or inaccurate rig relative data in the Exif data. The orientation of the lenses may for example change due to temperature changes, a hard landing, or damage to the camera.
In this case, you may force PIX4Dfields to use the software-based rig relative calibration (ignoring the manufacturer-provided information), by using the advanced settings and enabling the rig relatives calibration function. During processing, the software will then algorithmically recover the rig relatives by matching key points in different bands. This will increase the processing time by 1-2 minutes for each rig in the dataset.
Camera specific notes
- When processing Aerovironment Quantix RGN datasets, rig relatives calibration should be turned off in the advanced processing settings.
- The non-RGB sensors of the DJI Phantom 4 Multispectral are not fully synchronized. Band alignment artifacts may occur due to this, especially when flying at high speed. Our recommendation is to fly slow and get a minimum of 80% frontal and side overlap.
More information
To find out more information about rig relatives please see the following PIX4Dmapper workflow: Processing camera rigs.