PIX4Dmapper computes the external (X, Y, Z, Omega, Phi, Kappa) and internal (focal length, principal point, radial and tangential distortion) camera parameters during step 1. Initial Processing. As the definition of the camera distortion parameters in Inpho is not the same as in PIX4Dmapper and as the conversion between those definitions is not known, undistorted images have to be used in order to set the distortion parameters to 0. For more information about how to generate the undistorted images: Menu Process > Save Undistorted Images.
The following parameters and files can be imported into Inpho:
- Undistorted images
- External camera parameters
- Internal camera parameters
Undistorted images
The undistorted images can be found in ...\project_name\1_initial\images\undistorted_images.
Internal camera parameters
It is recommended to import firstly the internal camera parameters and then the external ones in order to avoid warning messages.
The internal camera parameters can be found in ...\project_name\1_initial\params\project_name_calibrated_internal_camera_parameters.cam. More specifically, the coordinates of the principal point can be found in the file under the description Principal Point Offset xpoff ypoff in mm (Inpho).

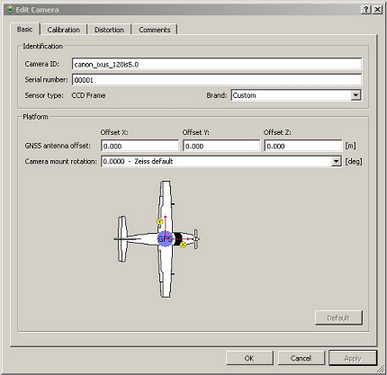
1. In the Edit Camera dialog in the Basic tab, set camera identification and platform.
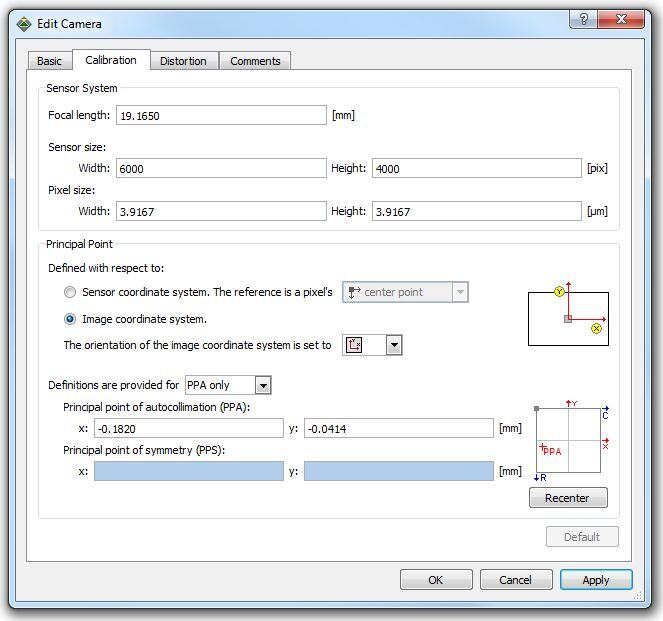
2. In the Edit Camera dialog in the Calibration tab:
- In the Sensor System section, set the focal length, sensor size and pixel size using the values obtained in project_name_calibrated_internal_camera_parameters.cam.
- In the Principal Point section, select the Image coordinate system.
Under Definitions are provided for select PPA only.
Under Principal point of autocollimation (PPA) set the values as follows:
Principal Point in [pix]
px = -0.1820 (as taken from Principal Point Offset xpoff ypoff in mm (Inpho))
py = -0.0414 (Principal Point Offset xpoff ypoff in mm (Inpho))
3. In the Edit Camera dialog in the Distortion tab, set the Use correction of type to None/Off as no distortions should be defined due to the use of undistorted images.

External camera parameters
The external camera parameters (X, Y, Z, Omega, Phi, Kappa) can be found in ...\project_name\1_initial\params\project_name_calibrated_external_camera_parameters.txt.
Use this file in the Frame Photos dialog (Ιmport -> Exterior Orientations ) to set the external camera parameters:

Disclaimer: Pix4D publishes this information as a courtesy to its customers. Pix4D makes no warranty of any kind, expressed or implied, with respect to the content's validity or accuracy.