The Theoretical Error S(X,Y,Z) and Error to GCP Initial Position are computed after Step1 and they give a good estimation of the accuracy of the block.
The Theoretical Error S(X,Y,Z) informs us about the relative accuracy, whereas the Error to GCP Initial Position informs us about the absolute accuracy.
A better explanation can be found below.
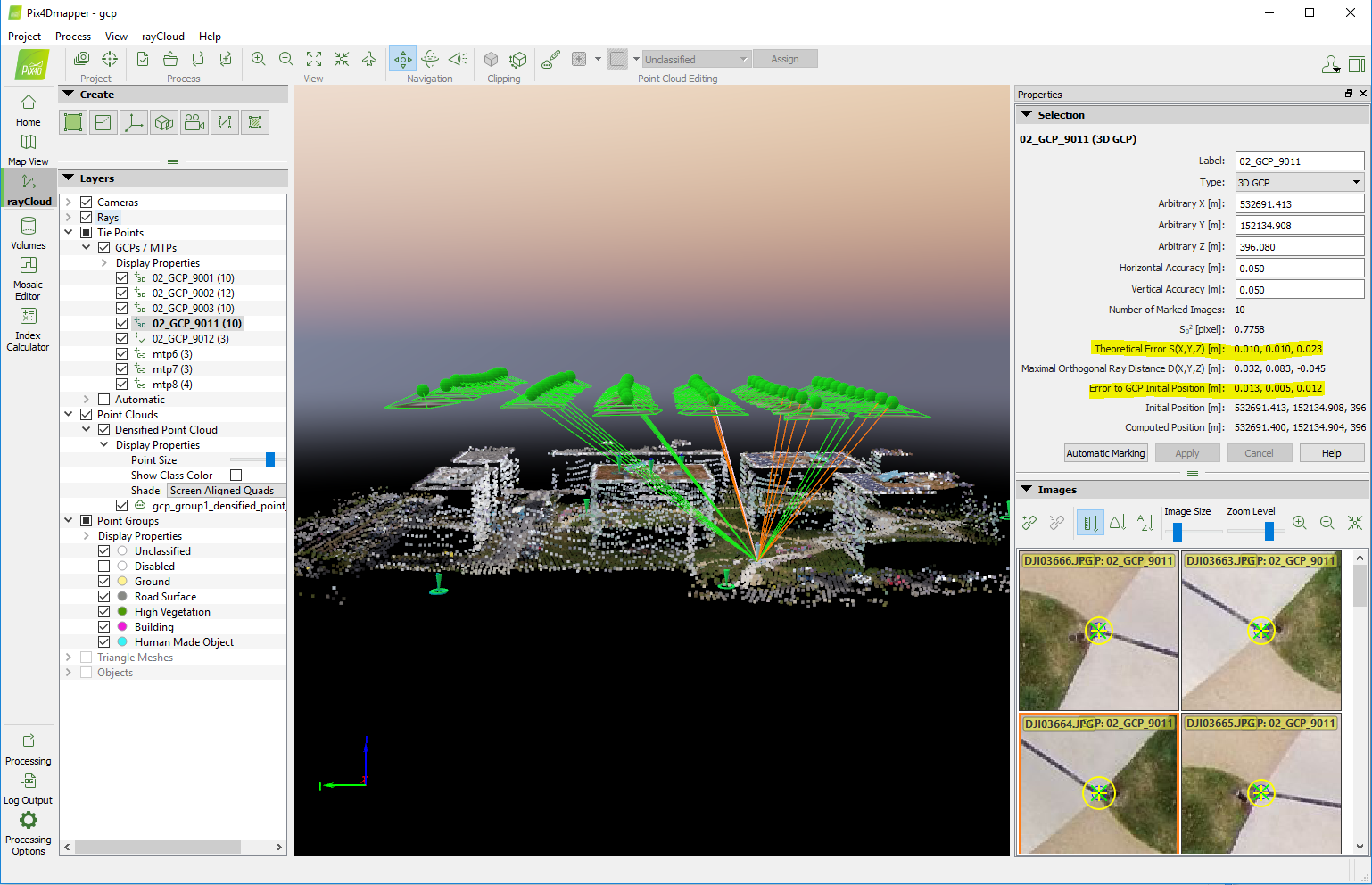
Theoretical error S(X,Y,Z)
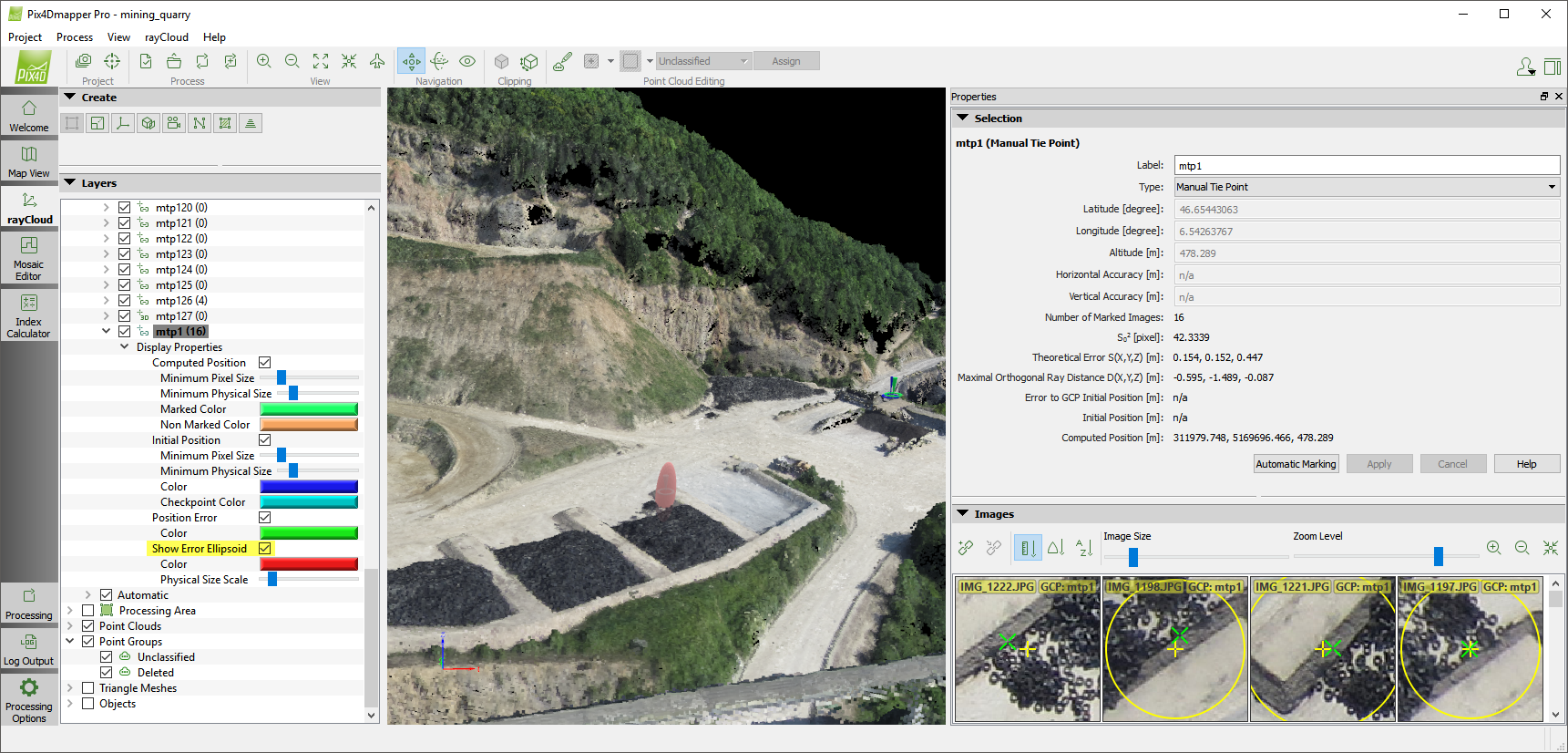
The Theoretical Error S(X,Y,Z) defines the three error ellipsoid axes of a GCP, and does not consider the Initial (input) position of the GCP. It can be seen in the rayCloud when clicking on a point.

If the Theoretical Error S(X,Y,Z) is low, it means that the error ellipsoid for that particular GCP is small, so there is a good relative accuracy.
If the Theoretical Error S(X,Y,Z) is high, it means that the error ellipsoid for that particular GCP is big, so the relative accuracy is not so good. That can happen when:
- The GCP was marked in very few images
The image below shows a point that has been marked on only two images with a small baseline (the distance between the center of the images). As a result, there is a large Theoretical Error in the direction of the rays:
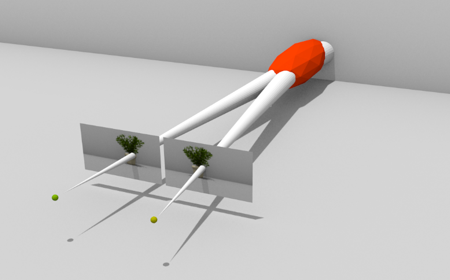
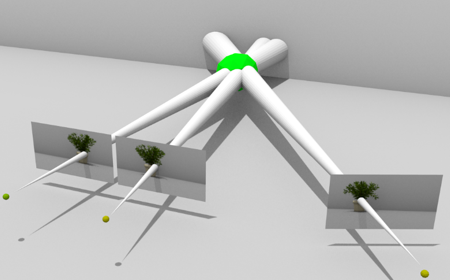
When the point is marked on a new image, the Theoretical Error gets smaller:
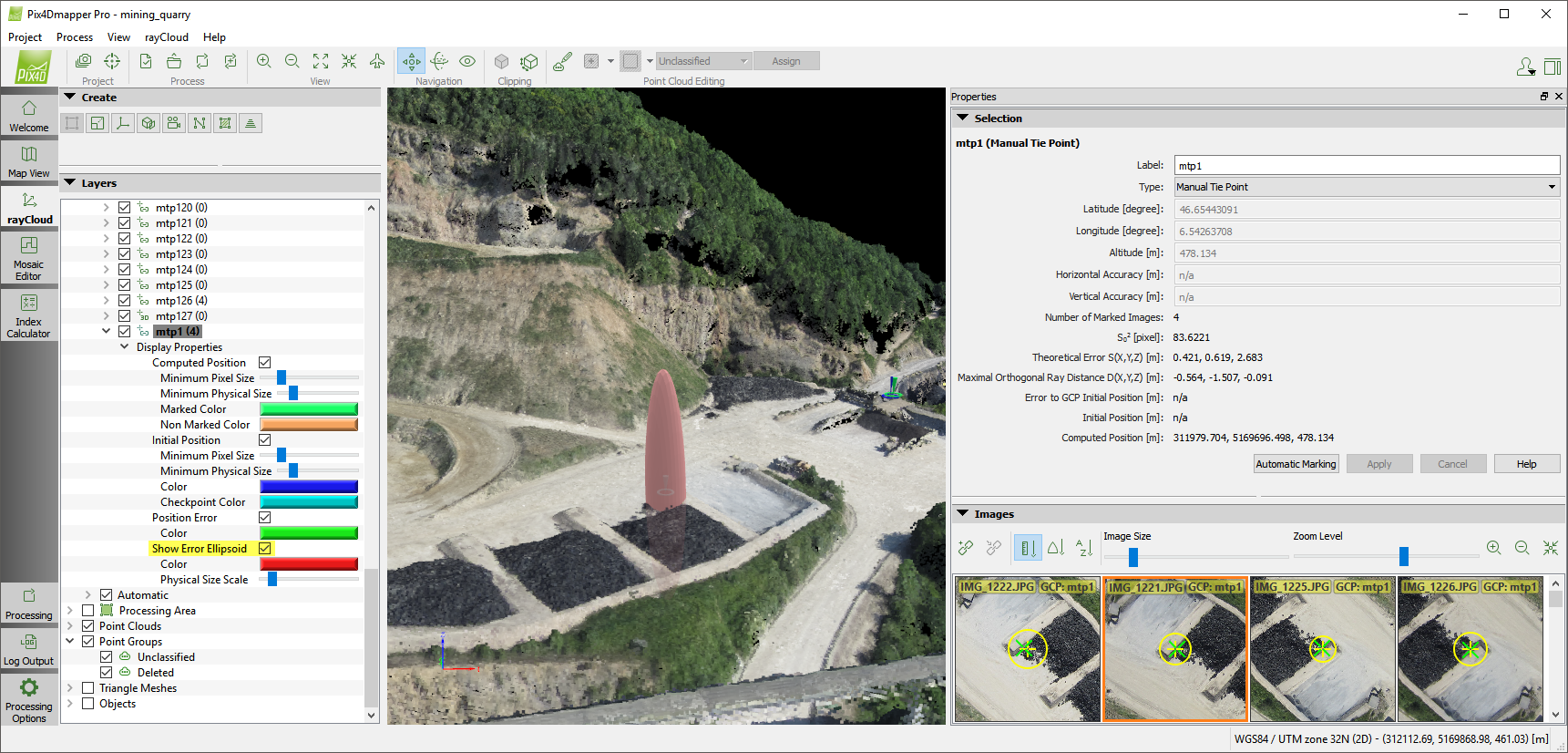
- The GCP was wrongly marked in some images
The example below shows a point that has been marked on only 4 images with a small baseline, and on one of them (2), it is marked erroneously:
When the point is correctly marked on more images, the following result is obtained:
- The error in Z is larger than the error in X and Y for nadir aerial images.
- If the error is larger than three times the GSD, the estimation of the 3D point needs to be improved by manually refining the point on the images using the rayCloud Editor.
Error to GCP Initial Position