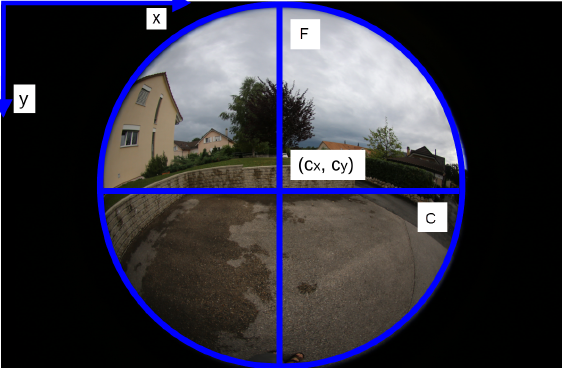
When using an 8mm Sigma lens on a Canon 6D camera with an image size of 5472 x 3648 pixel(figure. 3), the internal parameters can be initialized as follows:
- (cx, cy) = ( 5472/2, 3648/2 ) pixel is the center of the projected image circle
- p2 = p3 = p4 = 0
- p1 = 1
- C = F = 1780 pixel is the radius of the image circle
- E = D = 0