This article provides definitions of Yaw, Pitch, Roll and Omega, Phi, Kappa angles, as well as how to convert and use these angles in Pix4D products.
The main difference between the two sets of angles is:
- Yaw, Pitch, Roll angles define the rotation of a body, for example, aircraft or a drone with respect to its navigation coordinate system. Mostly used by drone manufacturers.
- Omega, Phi, Kappa angles define the rotation between the image coordinate system and a projected coordinate system. Mostly used in photogrammetry software.
IN THIS ARTICLE
Yaw, Pitch, Roll definition
Omega, Phi, Kappa definition
How to convert Yaw, Pitch, Roll to Omega, Phi, Kappa
Using Omega, Phi, Kappa and Yaw, Pitch, Roll angles in Pix4D
Yaw, Pitch, Roll definition
Yaw, Pitch, Roll angles define the relation between the navigation coordinate system and the body coordinate system. The coordinate systems and rotations are defined as:

Example
Assuming that the camera is mounted such that the camera looks down and the top of the image points to the front of the aircraft, the yaw, pitch, roll angles are defined as follows:
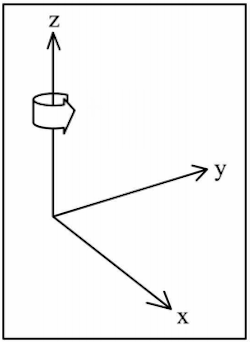
Yaw
- If yaw = 0° and the camera is looking to the ground (i.e. nadir), it means that the top of the image points to the north.
- If yaw = 90° and the camera is looking nadir, it means that the top of the image points to the east.
- If yaw = 270° and the camera is looking nadir, it means that the top of the image points to the west.
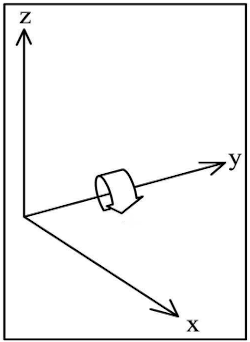
Pitch
- If pitch = 0°, it means that the camera is looking down (i.e. nadir).
- If pitch = 90°, it means that the camera is looking forward.
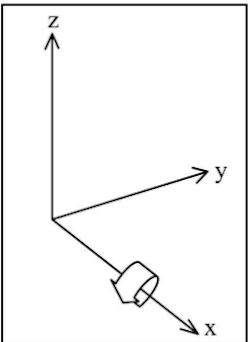
Roll
- If using a gimbal, this value is usually 0°.
Some more examples:
- yaw = 0°, pitch = 0°, roll = 0° means: the camera is nadir (looking down perpendicular to the ground), the top of the image points to the north.
- yaw = 0°, pitch = 90°, roll = 0° means: the camera is looking forward from the aircraft, towards north.
- yaw = 90°, pitch = 0°, roll = 0° means: the camera is nadir (looking down perpendicular to the ground), the top of the image points to the east.
Omega, Phi, Kappa definition
The omega, phi, kappa angles are defined as the angles used in order to rotate a (X, Y, Z) geodetic coordinate system and align it with the image coordinate system. The rotations are applied in the following order:
- Kappa (κ), the rotation around the Z axis.
- Phi (φ), the rotation around the Y axis.
- Omega (ω), the rotation around the Χ axis
More information about the coordinate system definition, see the How are the Internal and External Camera Parameters defined? article.
How to convert Yaw, Pitch, Roll to Omega, Phi, Kappa
Successfully converting from Yaw, Pitch, and Roll to Omega, Phi, and Kappa depends on several factors, including the camera's position on Earth.
There are many ways to convert Yaw, Pitch, and Roll to Omega, Phi, and Kappa. Pix4D's method is described in the attached documents:
- Yaw, Pitch, Roll, and Omega, Phi, Kappa angles and conversion - Pix4D companion notes, 2021 (150 KB)
- How are the Internal and External Camera Parameters defined?
- M. Bäumker and F.J. Heimes, New Calibration and Computing Method for Direct Georeferencing of Image and Scanner Data Using the Position and Angular Data of an Hybrid Inertial Navigation System, Proceedings of OEEPE Workshop on Integrated Sensor Orientation, 2002 (400 KB)
Using Omega, Phi, Kappa and Yaw, Pitch, Roll angles in Pix4D
Importing angle values into Pix4D
Most drone manufacturers write Yaw, Pitch, and Roll angle values directly in the EXIF tags of the images. If the EXIF tags are available, the values will be automatically converted to Omega, Phi, and Kappa when importing the images into Pix4D products. For more information: Specifications of xmp.camera tags.
Since the definition of Yaw, Pitch, and Roll may vary for different UAV manufacturers, it is not possible to guarantee that Omega, Phi, and Kappa can be calculated accurately for all UAVs.
If the orientation angles are not written in the EXIF of images, a text file can be used to import the values:
- PIX4Dmapper, the Omega, Phi, and Kappa angles can be imported using the Image Properties Editor - From File.... More in the Input files article.
- PIX4Dmatic, the Yaw, Pitch, and Roll can be imported using the File - Import image geolocations and orientations.... For more information: Image geolocation and orientation import format - PIX4Dmatic.
Processing options
At the moment, the processing options that directly influence the use of the orientation angles can only be selected in PIX4Dmapper.
Accurate angle values can be incorporated to accelerate processing time and produce more accurate results using the Accurate Geolocation and Orientation Calibration Method: Menu Process > Processing Options... > 1. Initial Processing > Calibration - PIX4Dmapper.
For more information: FAQ on the accurate geolocation pipeline (PIX4Dmapper).
It is possible to test the accuracy of the initial Omega, Phi, and Kappa values according to the variance (RMS) that appears in the Quality Report or compare the initial orientation with the optimized orientation calculated by PIX4Dmapper.
To test the accuracy of the initial Omega, Phi, and Kappa values apply Standard or Alternative Calibration Method: Menu Process > Processing Options... > 1. Initial Processing > Calibration - PIX4Dmapper.
PIX4Dmapper calculates the optimized orientation during Step 1. Initial Processing.