Normally, the GPS of a drone is not very accurate.
The inaccuracy of the GPS may lead to large errors in 3D position, orientation, and scale, as seen below. Therefore, it is strongly recommended to have at least 50% of georeferenced images for an acceptable approximation.

Not enough geotags (less than 50%): resulting in wrong orientation and scale of the reconstruction.
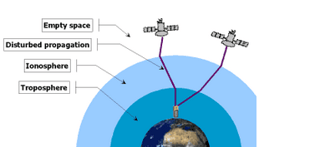
When there are sufficient GPS positions taken in a grid pattern, Pix4D averages the GPS positions, resulting in a very good approximation of the scale and 3D orientation of the model. However, the optimized position may be shifted 10 to 20 meters due to the atmospheric conditions when the GPS data was acquired. Ground control points (GCPs) have to be used to increase the absolute accuracy of the project.