The image shooting rate to achieve a given frontal overlap depends on the speed of the UAV/plane, the GSD and the pixel resolution of the camera.
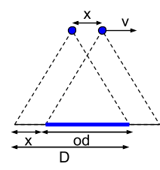
D = distance covered on the ground by one image in the flight direction [m]
overlap = percentage of desired frontal overlap between two images
od = overlap between two images in the flight direction [m]
x = distance between two camera positions in the flight direction [m]
v = flight speed [m/s]
t = elapsed time between two images (image rate) [s]
From Figure 1, we obtain the following equations:
od = overlap * D (1)
x = D - od (2)
t = x / v (3)
Two cases are possible:
- Camera oriented with the sensor width (long dimension) perpendicular to the flight direction (usual case)
- Camera oriented with the sensor width (long dimension) parallel to the flight direction
Camera oriented with the sensor width (long dimension) perpendicular to the flight direction (usual case)
D = Dh = (imH * GSD) / 100 (4)
Where:
Dh = distance covered on the ground by one image in the height direction (footprint height) [m]
imH = image height [pixel]
GSD = desired GSD [cm/pixel]
Combining Equations (1) and (4) into Equation (2):
x = Dh - overlap * Dh
x = Dh * (1 - overlap)
x = ((imH* GSD) / 100) * (1 - overlap) (5)
Combining the equations (3) and (5):
t = x / v = ((imH * GSD) / 100) * (1 - overlap) / v (6)
t = ((imH * GSD) / 100) * (1 - overlap) / v = ((4000 * 5 ) / 100) * (1 - 0.75) / 8.33 = 6 [s]
Camera oriented with the sensor width (long dimension) parallel to the flight direction
If the camera is placed on the plane / UAV having the sensor width (long dimension) parallel to the flight direction:
D = DW = (imW * GSD) / 100 (7)
Where:
DW = distance covered on the ground by one image in the width direction (footprint width) [m]
imW = image width [pixel]
GSD = desired GSD [cm/pixel]
Combining equations (1) and (7) into the equation (2):
x = DW - overlap * DW
x = DW * (1 - overlap)
x = ((imW * GSD) / 100) * (1 - overlap) (8)
Combining equations (3) and (8):
t = x / v = ((imW * GSD) / 100) * (1 - overlap) / v (9)