Camera rigs are systems connecting several cameras by rigs. With one trigger command, referred to as a capture, the system enables all the cameras connected in the rig to take images simultaneously (with a time difference much less than the image read-out time, which should be in millisecond level).
How are the images assigned to the different rig instances?
Parrot Sequoia and MicaSense RedEdge cameras are processed in PIX4Dmapper as camera rigs. For both Parrot Sequoia and MicaSense RedEdge cameras, when a capture is triggered, an image per sensor is taken (i.e. for Parrot Sequoia 1 capture contains 4 images since it has 4 sensors: G, R, RE, NIR; for MicaSense RedEdge 1 capture contains 5 images since it has 5 sensors B, G, R, RE, NIR). These captures are assigned to one rig instance to calibrate the rig successfully.
The rig assignment algorithm uses the unique identifier associated with each capture, available from the image EXIF of Parrot Sequoia or Micasense Rededge cameras, to group the images from capture and assign them to rig instances.
Moreover, in case of missing images per rig instance, the rig instance will be identified as incomplete and further disabled. Only a limited amount of incomplete captures is allowed for the processing to continue. If more than 5% of the total number of captures are incomplete the processing will stop.
How to edit the rig model parameters and processing options?
Access camera rig parameters
To access camera rig parameters follow the instructions:
1. On the menu bar, click Project > Image Properties Editor...
2. In the section Selected Camera Model, next to the rig model name, click Edit...
3. In the window Edit Camera Rig Model, next to the Rig Model Name, click Edit.
Edit camera rig parameters
Here is a description of the different parameters that can be edited in the Edit Camera Rig Model window:
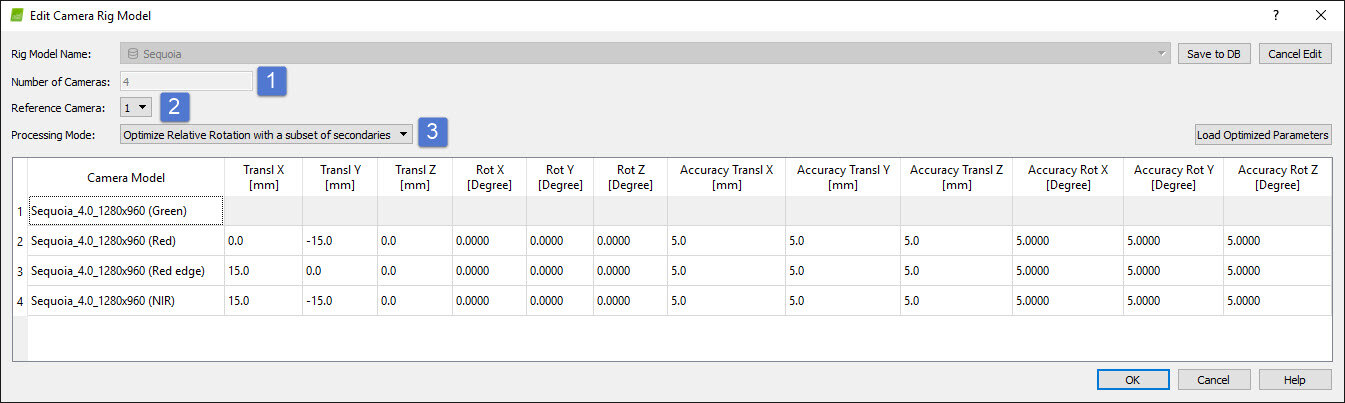
![]() The number of cameras in the rig is fixed by the rig model and cannot be changed.
The number of cameras in the rig is fixed by the rig model and cannot be changed.
![]() The reference camera is the camera concerning which the other cameras are positioned. In PIX4Dmapper, having parameters that describe how the cameras are connected is crucial for calibrating camera rigs successfully. Those parameters include the spatial position of the cameras concerning the reference one, called the rig relatives.
The reference camera is the camera concerning which the other cameras are positioned. In PIX4Dmapper, having parameters that describe how the cameras are connected is crucial for calibrating camera rigs successfully. Those parameters include the spatial position of the cameras concerning the reference one, called the rig relatives.
- The difference in translations along the x, y, and z-axes (columns Transl X, Transl Y, Transl Z [mm] in the window Edit Camera Rig Model).
- The difference in rotation (columns Rot X, Rot Y, Rot Z [Degree] in the window Edit Camera Rig Model).
![]() Several rig processing modes are available:
Several rig processing modes are available:

- Rely on relatives: To be used if the rig relatives (translations and rotations) should stay fixed and not be optimized/modified.
- Optimize Relative Rotation: Will find matches across all cameras and optimize the rotations accordingly (the translations are fixed).
- Optimize Relative Rotation with a subset of secondaries: Same as Optimize Relative Rotation, but reducing the number of rig instances in the computation to decrease processing time. This is recommended for multispectral cameras in Pix4D's camera model database. The results are similar to Optimize Relative Rotation (but faster).
- Optimize Independently: It allows the relatives to take different values for different rig instances, for example in case of vibrations. This would make sense for rigs with larger cameras.
- Disable rig: Calibrate ignoring the rig constraints.
- Calibrate rig: Option to obtain the rig constraints (both translation and rotation). Requires GCPs for scale.